Parallel experimental device for six-degree-of-freedom gait simulation
An experimental device and a technology of degrees of freedom, applied in the field of mechanical devices, can solve problems such as inability to form a dual relationship, few degrees of freedom, and mismatch between active and passive relationships, and achieve the effect of simple and compact structure and high rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
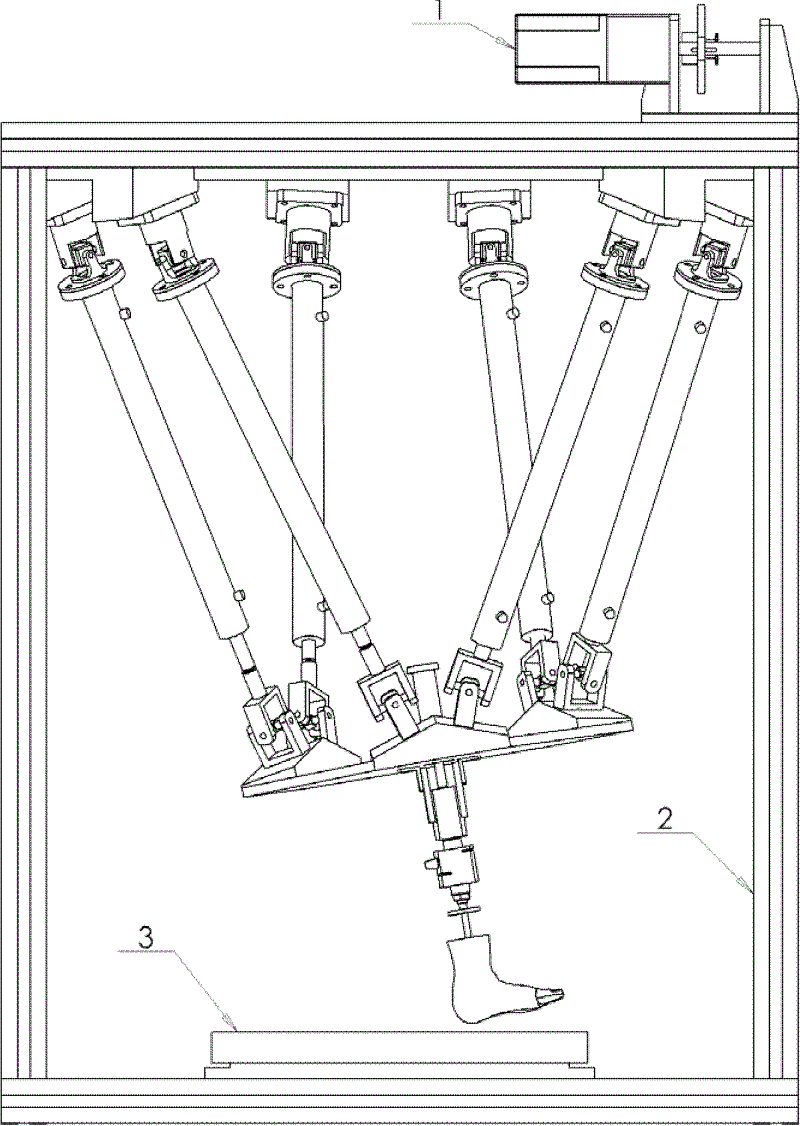
[0033] Such as figure 1 As shown, the parallel six-degree-of-freedom gait simulation experimental device includes a frame structure 1, figure 2 The six-bar parallel mechanism and Figure 8 tandem loading mechanism. Among them, the frame 1 is fixed on the ground, the tendon driving motor 2 is installed on the top of the frame, the six-bar parallel mechanism is suspended on the upper part of the frame, and the height-adjustable force plate 3 is installed on the lower part of the frame. The six-bar parallel mechanism is fixed to the frame 1 through its fixed platform 4, and the series loading mechanism is installed on the moving platform 6 of the six-bar parallel mechanism.
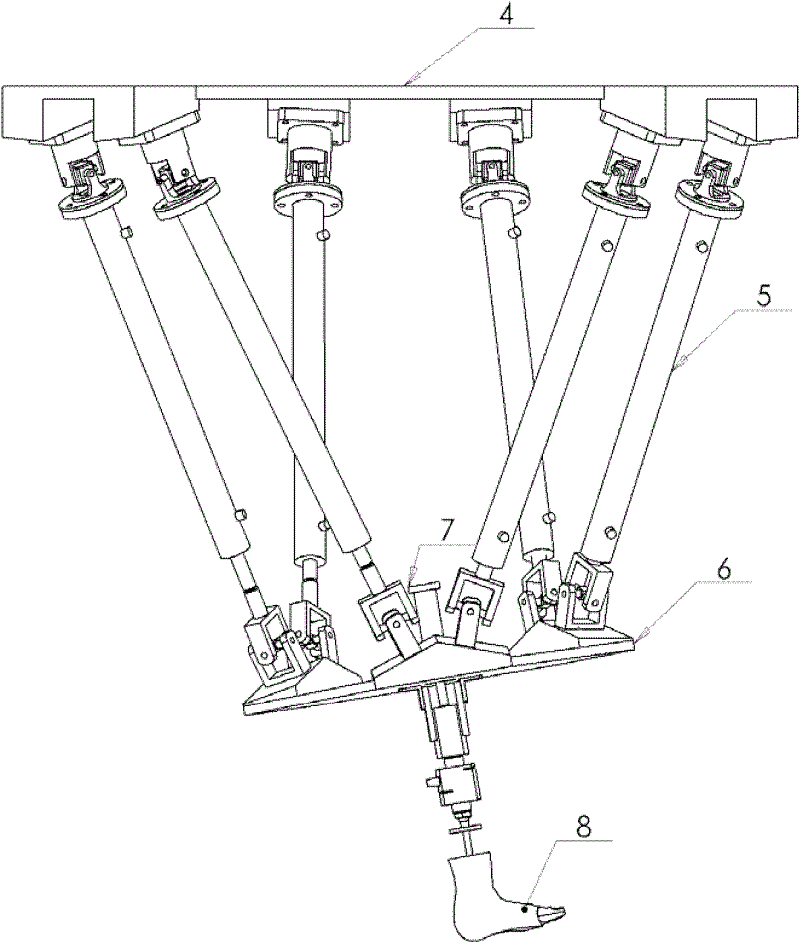
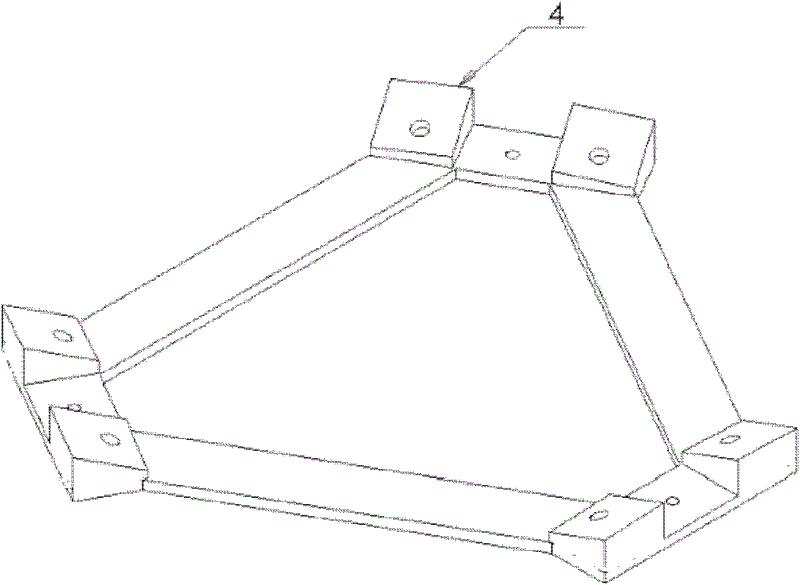
[0034] Such as figure 2 As shown, the six-bar parallel mechanism adopts a typical Stewart parallel structure, which is composed of a fixed platform 4, 6 top U-shaped fixed seats 16, 6 identical motion branch chains 5, 6 bottom U-shaped seats and a moving platform 6 UPU parallel mechanism, its moving pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com