


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Obstacle processing method for robot
A processing method and robot technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of missing or repeated cleaning in the cleaning area, and missed scanning in the area, so as to improve the efficiency of dust removal and avoid the effect of missed sweeping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
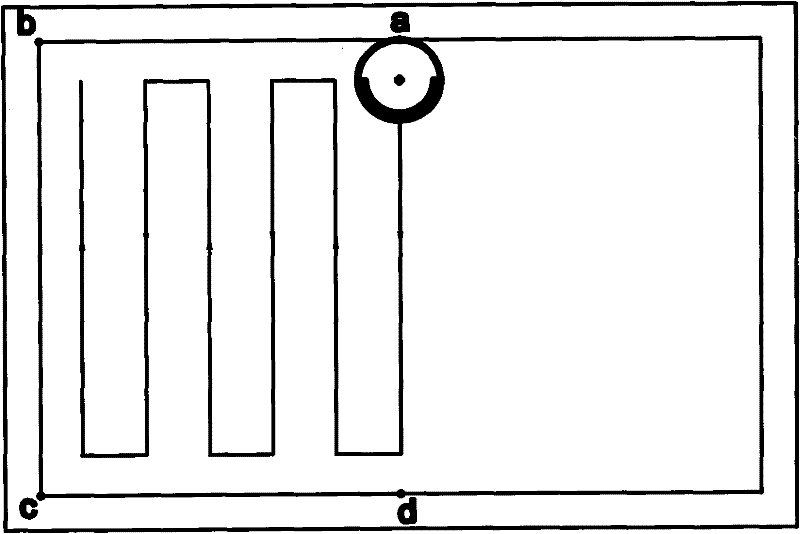
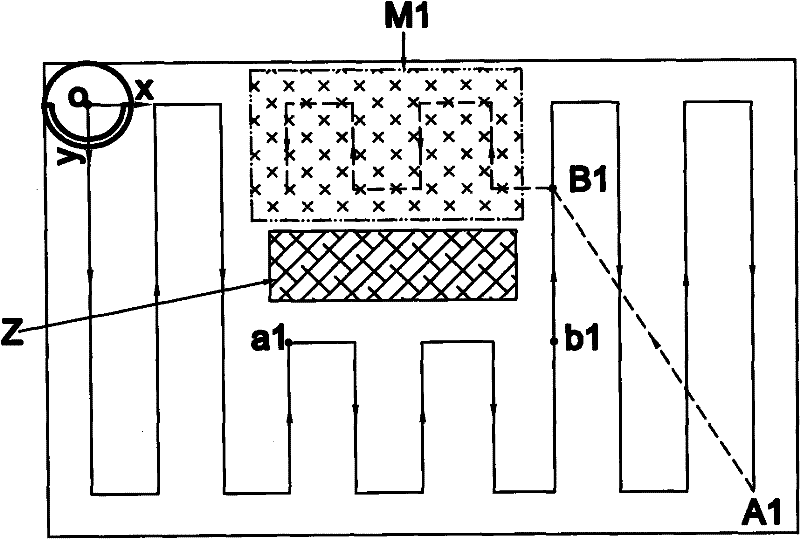
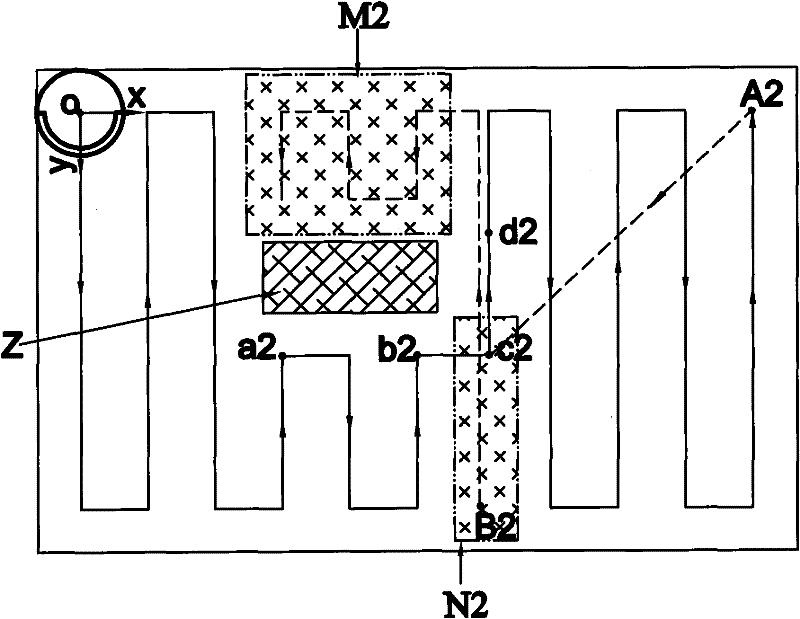
[0040] Example: Reference Figure 1-14 , the present invention provides a specific embodiment of a robot obstacle handling method. First, start the robot by operating the operation buttons on the robot body or selecting the cleaning method through the remote controller. The robot starts from the base station or from other places except the base station, and then divides the cleaning area according to the different starting locations:
[0041] When the robot starts from the base station and encounters an obstacle for the first time, the robot will use the connection line between the base station and the collision point as the dividing line, divide the cleaning area into left and right parts, and start from the left area Start cleaning. After cleaning on the left side, the robot quickly returns to the right side by the shortest path and starts cleaning on the right side. Of course, the robot can also clean the right side area first, and then clean the left side area.
[0042] W...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com