Emergency brake control device and emergency brake control method for automatic vehicle driving robot
An emergency braking and automatic driving technology, applied in the direction of automatic starting device, brake, etc., can solve the problem of not being able to adjust the control scheme in real time, and achieve the effect of convenient installation and disassembly, high control accuracy and wide range of applicable models.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
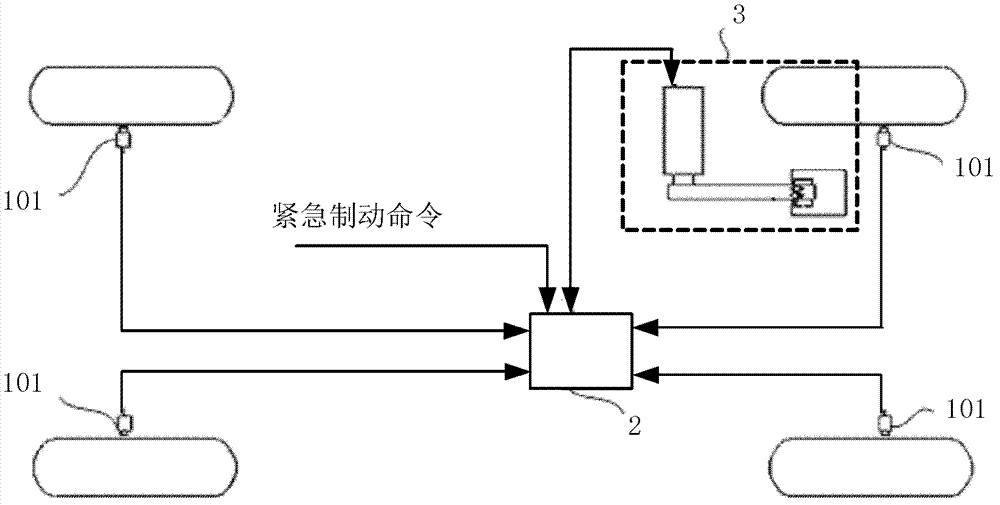
[0039] like figure 1 As shown, the emergency braking control device for a vehicle automatic driving robot mainly includes a vehicle running state detection unit 1, a control unit 2 and an execution unit 3, such as figure 1 shown, as figure 2 shown.
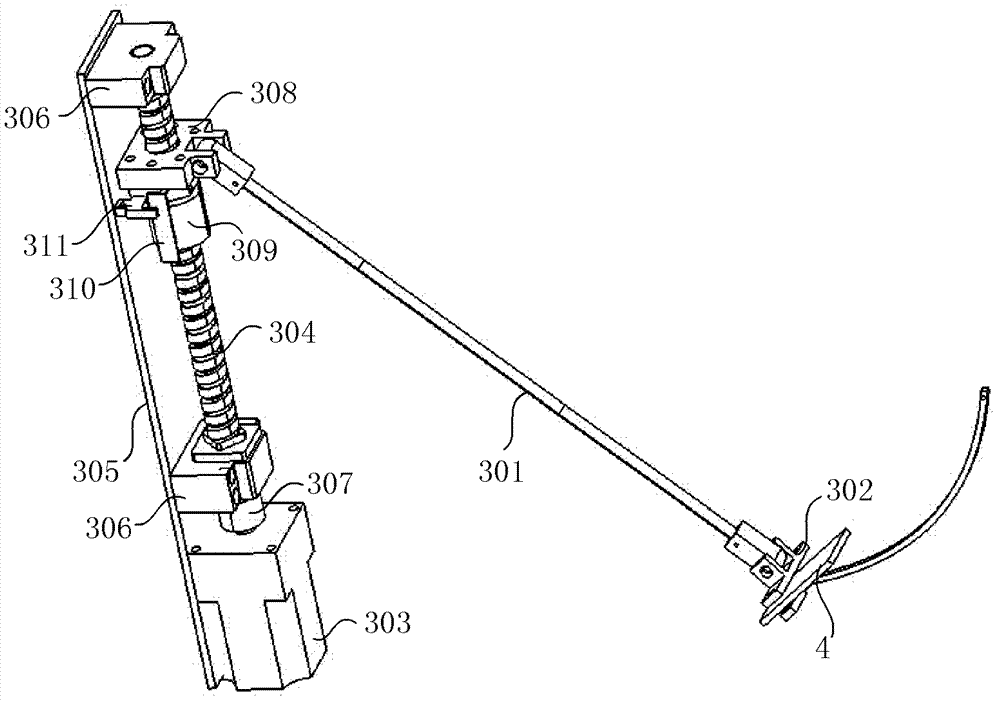
[0040] The execution unit 3 is the execution device of the emergency braking control device of the present invention, such as image 3As shown, it includes a brake machine leg 301 , a pedal connecting plate 302 , a driving motor 303 , a lead screw 304 and a mounting plate 305 . Wherein, the servo motor is fixedly installed on the mounting plate 305 as the driving motor 303 . Both ends of the lead screw 304 are sleeved with a support frame 306 , and the lead screw 304 can rotate freely in the two support frames 306 . The two supporting frames 306 are fixed on the mounting plate 305 , and the lead scr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com