


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Automatic mechanism for recovering ping-pong balls on ground and automatic cyclic ping-pong training device
An automatic recovery and training device technology, applied in the direction of ball games, sports accessories, etc., can solve the problems of not being able to make full use of the training time to practice the ball, consume manpower and time, and cannot automatically practice table tennis in a loop, so as to improve the practice effect , No manpower consumption, easy table tennis effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
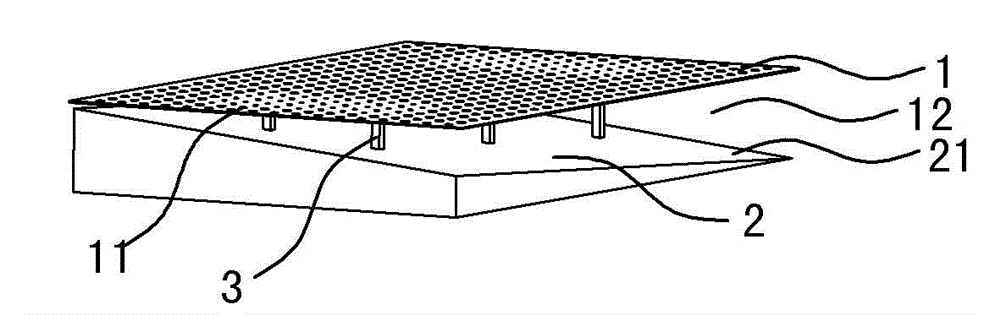
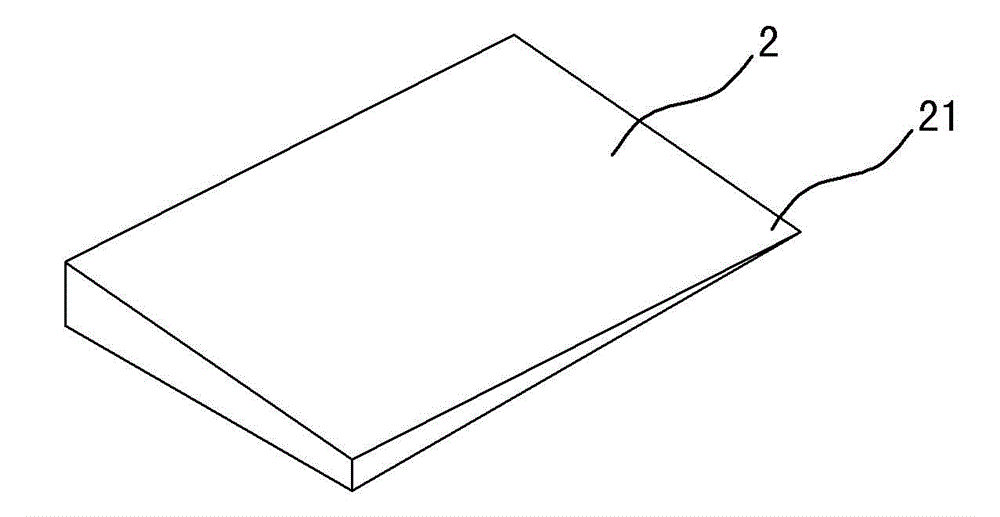
[0025] Embodiment one, such as figure 1 , figure 2 As shown, it includes a floor 1 and an automatic ball-collecting surface 2. The floor 1 is a plate-shaped body that is horizontally arranged on the board surface, and a plurality of table tennis leakage holes 11 are arranged between the upper surface and the lower surface. The automatic ball-collecting surface 2 is located on the floor. There is a table tennis ball rolling space 12 between the bottom of 1 and the floor 1, and the automatic ball collection surface 2 has a lowest ball collection position 21, and between other positions and the ball collection position 21, there is a table tennis ball that can automatically leak from the floor. Roll towards the ramp at ball collection location 21.
[0026] Between the automatic ball-collecting surface 2 and the floor 1, several pillars 3 whose lower ends are fixed on the automatic ball-collecting surface 2 and whose upper ends are supported on the lower surface of the floor 1 ...
Embodiment 2
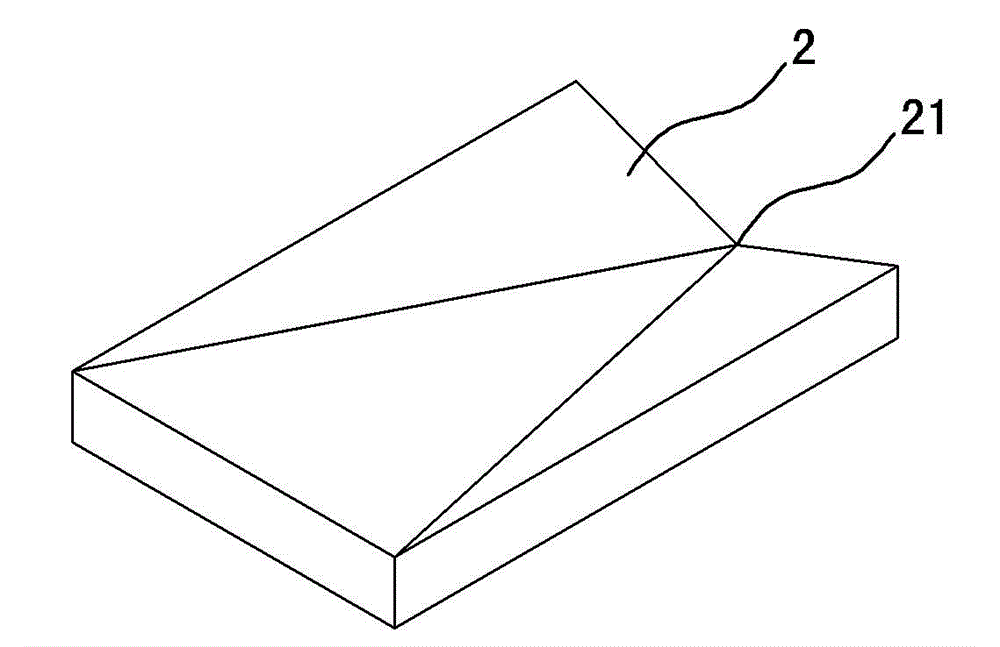
[0029] Embodiment two, such as image 3 As shown, the difference with Embodiment 1 is that the positions of the four corners of the automatic spherical surface 2 are equal, the midpoint position of the edge between a pair of adjacent corners is lower than the position of the four corners, and the automatic spherical surface 2 It consists of three inclined planes inclined from four corners to the midpoint position, and the midpoint position of the side between two adjacent corners is the ball collecting position 21 .
Embodiment 3
[0030] Embodiment three, such as Figure 4 As shown, the difference with Embodiment 1 is that the positions of the two adjacent corners of the automatic spherical surface 2 are equal, and the positions of the other two adjacent corners are equal and lower than the positions of the previous pair of adjacent corners. The midpoint of the side between two adjacent corners of the lower position is lower than the position of these two corners, and the midpoint position of the side between two adjacent corners of the lower position is lower than the position of these two corners and lower than The midpoint position of the side between the other two adjacent corners, the automatic spherical surface 2 is composed of two inclined planes inclined from the side between the two adjacent corners with one high position and one low position to the line connecting the two midpoints , the midpoint position of the side between the two adjacent corners at the lower position is the ball-collecting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com