Exoskeleton type upper limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as mobilizing the enthusiasm of patients for rehabilitation, limiting the scope of training, and integrating with virtual reality technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the above features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings.
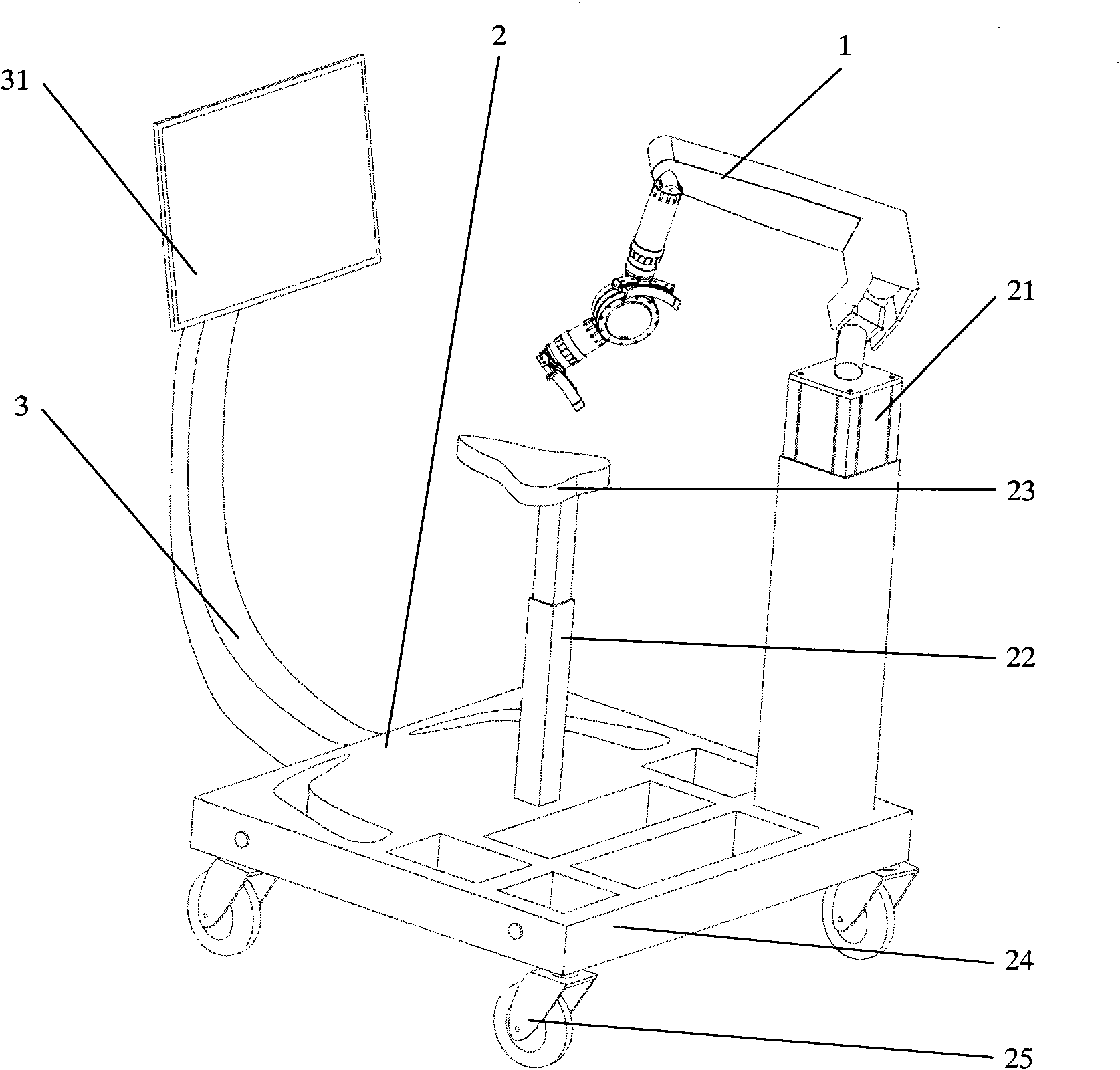
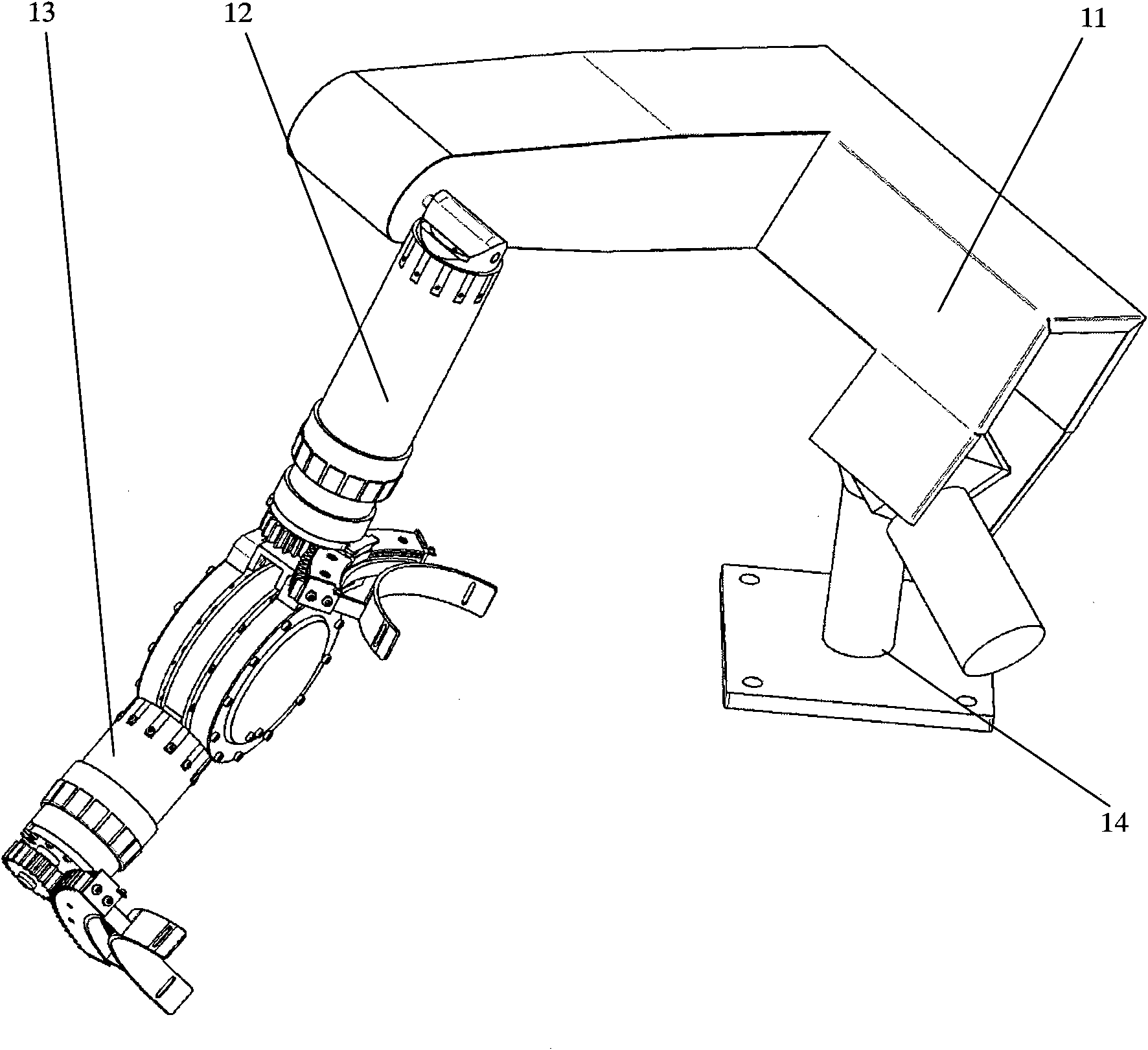
[0029] figure 2It is a structural schematic diagram of the present invention. It includes a mechanical arm (1), an auxiliary mechanism (2), and a control system (3). The auxiliary mechanism includes a lifting mechanism and a mobile base (24), and four universal wheels (25) with self-locking functions are evenly distributed around the mobile base. Lifting mechanism comprises servo column A (21), servo column B (22), and saddle-shaped seat (23). The saddle-shaped seat is fixed on the servo column B, and the height of the seat can be adjusted by the command of the control system, so that the patient can perform rehabilitation training in different sitting states. The robotic arm is mounted on the servo column A. The two servo columns are inst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com