Omnidirectional wheel type mobile robot
A mobile robot, omnidirectional mobile technology, applied in the field of mechanical engineering, can solve problems such as easy to generate vibration, the outer contour of the wheel is not a pure circle, and walking is unstable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach
[0017] Such as figure 1 As shown, the present invention comprises two major parts altogether: three compound wheel devices 1 and mobile robot body 2; Three wheels are installed on the mobile robot at an angle of 120° between two pairs, and each wheel moves centrifugally Robot center distances are equal.
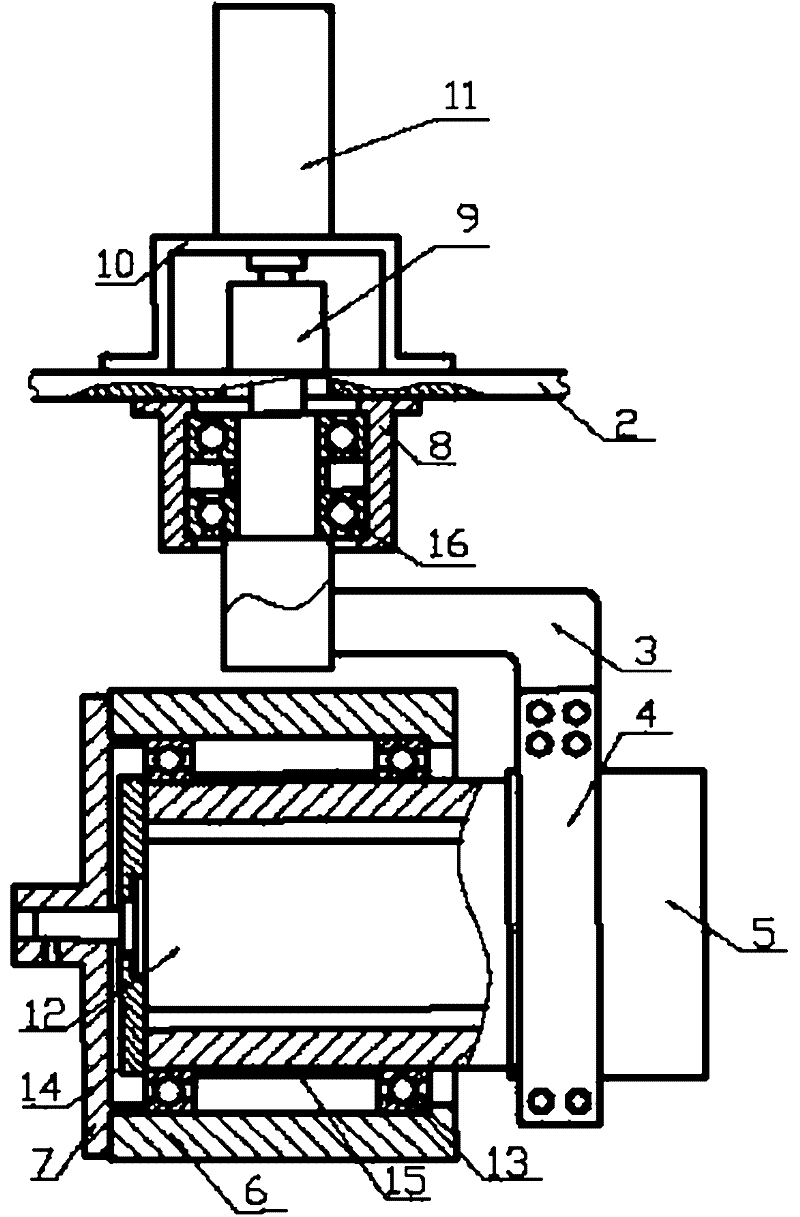
[0018] Such as figure 2 , image 3 As shown, the wheel axial drive motor 12 is fixed on the motor sleeve end cover 14, the motor sleeve end cover 14 is fixed with the motor sleeve 5 by screws, the motor sleeve 5 and the wheel body 6 are connected by a rolling bearing 13, two Rely on axle sleeve 15 to locate between rolling bearing, the output shaft of axial drive motor 12 is directly connected with wheel hub 7 by key, when motor outputs a rotating speed, due to the effect of bearing, will drive wheel to rotate thereby drive mobile robot to advance.
[0019] The motor sleeve 5 is connected with the wheel radial rotation shaft 3 by the U-shaped splint 4, the wheel radial ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com