


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for determining scanning sequence of reference image pixel points
A scanning sequence and reference image technology, applied in 3D image processing, image communication, image data processing, etc., can solve problems such as DIBR description scanning sequence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
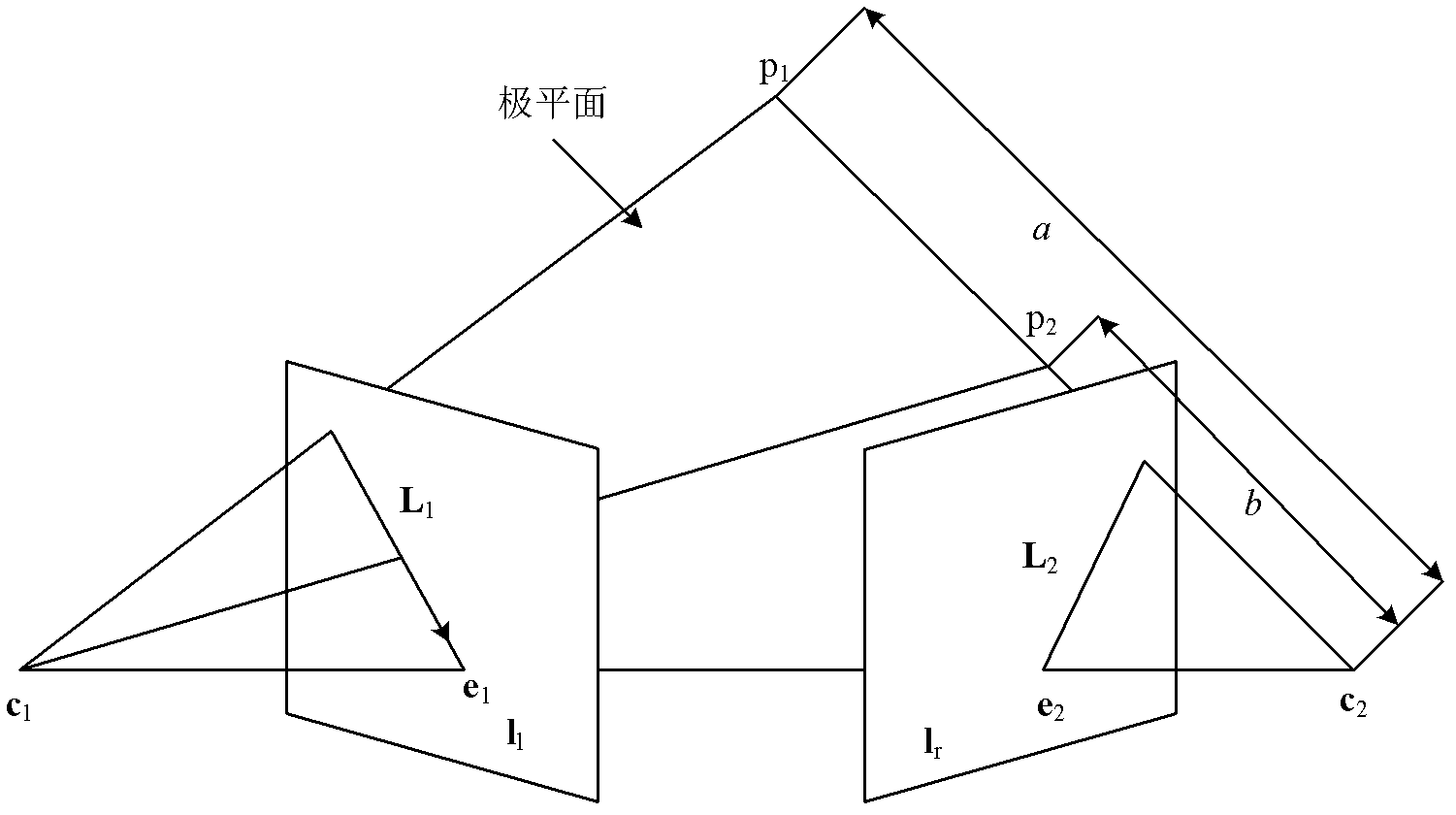
[0045] Such as figure 1 As shown, a, b represent the pixel point p 1 ,p 2 from the virtual camera optical center c 2 distance, and a>b. from figure 1 It can be concluded that: in the reference image I l along the epipolar line L 1 point to the positive pole e 1 When processing the pixels in the reference image, the distance from the virtual camera optical center c 2 far pixel point p 1 Draw first, the nearest pixel point p 2 After drawing, so away from the optical center c 2 Nearest pixel point p 2 The information will cover the distant pixel point p 1 information to establish the correct visibility relationship. if e 1 is a negative pole, then in the reference image I l Pixels are processed along the direction of the epipolar line away from the negative pole.
[0046] Since all pixels that may cause wrinkles can be constrained on polar planes, all polar planes intersect at the baseline, and all epipolar lines intersect at poles. In this way, as long as the pol...
example
[0068] In this example, the "ballet" sequence (image resolution 1024*768) is used for experiments. The video capture system used in this sequence is as follows: Figure 11 As shown, it has 8 cameras, cameras 0, 2, 5, and 7 are placed on the arc with a central angle of 30°, and other cameras are placed on the secant of the arc in turn. The field of view (Field of View, FOV) of the camera is 30°, and the data of this sequence contains the internal parameter matrix K of each camera i and the external parameter matrix [R i | T i ] (0≤i≤7).
[0069] In this example, the image captured by the camera 5 is used as the reference image and the image captured by the virtual camera 4 is used. Among them, the internal parameter matrix K of camera 4 4 and external parameter matrix [R 4 | T 4 ] As shown in formula (5) and formula (6); the internal parameter matrix K of camera 5 5 and external parameter matrix [R 5 | T 5 ] as shown in formula (7) and formula (8).
[0070] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com