Novel robot walking mechanism and method
A walking mechanism and robot technology, applied in the field of intelligent robots, can solve problems such as high height, slow motor speed, and high energy consumption, and achieve the effects of increasing speed and frequency, reducing weight, and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
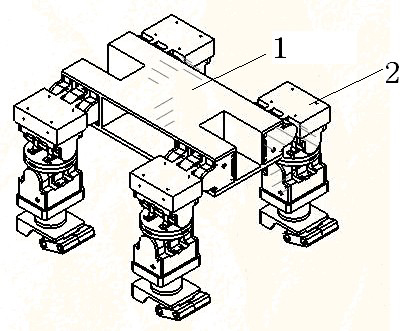
[0029] Such as figure 1 As shown, a new type of robot walking mechanism disclosed in this embodiment includes a body frame 1, and two walking units 2 are symmetrically distributed on the left and right sides of the body frame 1, and each walking unit 2 includes four joint modules. A joint module includes a joint shaft and a rotating arm. The first-level joint module and the second-level joint module of the walking unit 2 are combined to form a lifting and lowering mechanism for the walking unit to independently perform the function of lifting and lowering legs. Other joint modules The combination is a walking leg mechanism that independently performs the walking function of the walking unit.
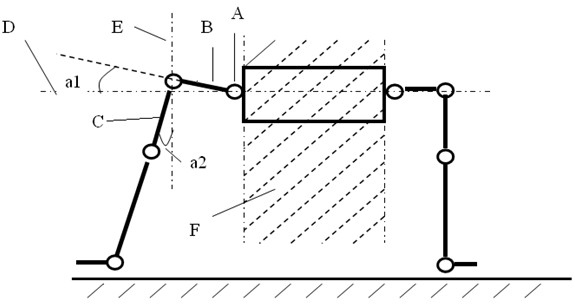
[0030] Such as figure 2 As shown, the joint rotation axis A of the first-level joint module is located in an interval other than the interval F occupied by the body frame 1 in the vertical direction. When the body frame 1 is in a temporary steady state (short pause during movement) du...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com