Construction method for neural network generalized inverse decoupling controller of bearing-free synchronous reluctance motor
A technology of synchronous reluctance motor and neural network, which is used in motor generator control, AC motor control, biological neural network model, etc., can solve problems such as poor control effect, achieve low power consumption, simple control method, axial The effect of length reduction
Inactive Publication Date: 2011-06-15
JIANGSU UNIV
View PDF4 Cites 13 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
In addition, its decoupling control method is to use the neural network generalized inverse directly as a nonlinear open-loop controller, and the control effect is not good.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
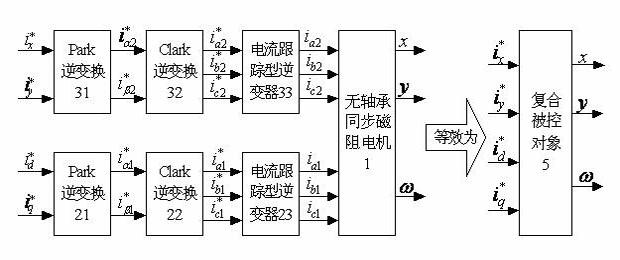
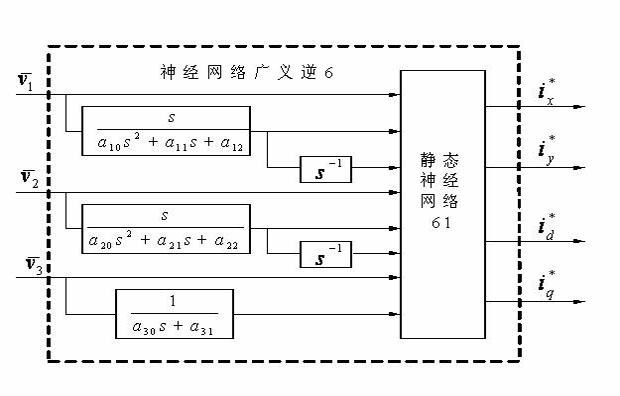
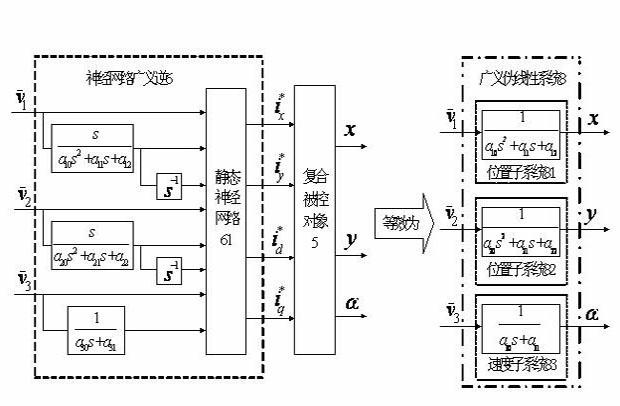
The invention discloses a construction method for a neural network generalized inverse decoupling controller of a bearing-free synchronous reluctance motor, which comprises the steps: taking two Park inverse converting type inverters, two Clark inverse converting type inverters and two direct current tracking type inverters as a wholly-formed composite controlled object after the two Park inverse converting type inverters, the two Clark inverse converting type inverters and the two direct current tracking type inverters are respectively and sequentially connected with one another in series and before the two Park inverse converting type inverters, the two Clark inverse converting type inverters and the two direct current tracking type inverters are connected with the bearing-free synchronous reluctance motor; forming a generalized imitative linear system before a constructed neural network generalized inverse is connected with the composite controlled object in series, and forming a linear closed loop controller by two position controllers and a speed controller; and jointly forming the neural network generalized inverse decoupling controller by the means that the linear closed loop controller, the neural network generalized inverse, the two Park inverse converting type inverters, the two Clark inverse converting type inverters and the two direct current tracking type inverters are respectively and sequentially connected with one another in series. The independent decoupling control between the electromagnetic torque and the radial levitation force and the independent decoupling control of the radial levitation force between two components on the vertical direction are realized according to the closed ring control and the PID (proportion integration differentiation) parameter adjustment, and the control performance of the bearing-free synchronous reluctance motor is obviously improved.
Description
Construction method of neural network generalized inverse decoupling controller for bearingless synchronous reluctance motor technical field The invention relates to a neural network generalized inverse decoupling controller for a bearingless synchronous reluctance motor, which is used for high-performance control of a bearingless synchronous reluctance motor and belongs to the technical field of electric drive control equipment. Background technique The bearingless synchronous reluctance motor meets the requirements of modern industry for high-speed, non-lubricated, friction-free, and maintenance-free high-performance drive motors. It is a new type of synchronous reluctance motor with excellent performance of magnetic bearings and Motors have broad application prospects in special electrical transmission fields such as machine tool electric spindles, turbomolecular pumps, centrifuges, compressors, electromechanical energy storage, and aerospace. Bearingless synchronous re...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): H02P6/08H02P25/08G06N3/02H02P21/00H02P21/18H02P25/089
Inventor 张婷婷张维煜朱睿智朱熀秋
Owner JIANGSU UNIV
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com