Robot clamping carrier
A carrier and robot technology, which is applied in the field of mechanical three-dimensional parking equipment, can solve the problems of high after-sales cost, poor overall rigidity, and difficulty in ensuring movement synchronization, so as to improve equipment rigidity and service life, improve movement consistency, and reduce civil engineering. cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
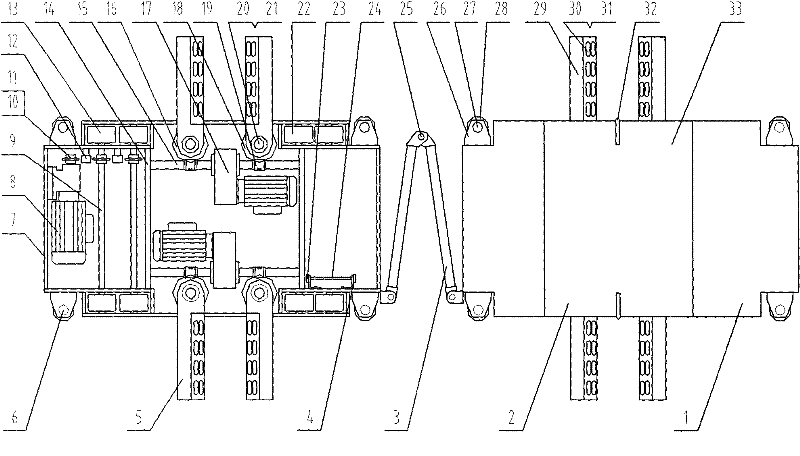
[0026] The robot holding clip carrier of the present invention is used for the handling of vehicles in the mechanical three-dimensional garage, such as figure 1 -As shown in Figure 8, it includes two transfer trolleys 1 with front and rear symmetrical arrangements and the same structure, a synchronous gripper 2 with two pairs of robotic arms 5 arranged on each transfer trolley 1, and a connection between the two transfer trolleys 1 Telescopic folding arm 3, electrical positioning system 4 for detecting the position of the front and rear wheels of the automobile.
[0027] Two transport trolleys 1 of the present invention have the same structure, and respectively hold and clamp the front tire and the rear tire of the automobile. The following takes one as an example to illustrate its structure. The transport trolley 1 includes a trolley body 7, a walking drive motor reducer 8, a sprocket wheel 10, Chain 11, driving wheel 13, driving wheel shaft 9, tensioning wheel 12, driven whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com