Motor control device of amphibious robot
A technology of motor control and control devices, which is applied in the direction of electrical program control, program control manipulator, program control in sequence/logic controller, etc., which can solve problems that are not conducive to system assembly, debugging, fault detection and troubleshooting, system maintenance, repair and maintenance , unable to meet the needs of the development of the amphibious robot control system, relying on the main control computer and the centralized control board of the motor, etc., to achieve the effect of saving development time and workload, flexible selection of communication interfaces, and flexible layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings.
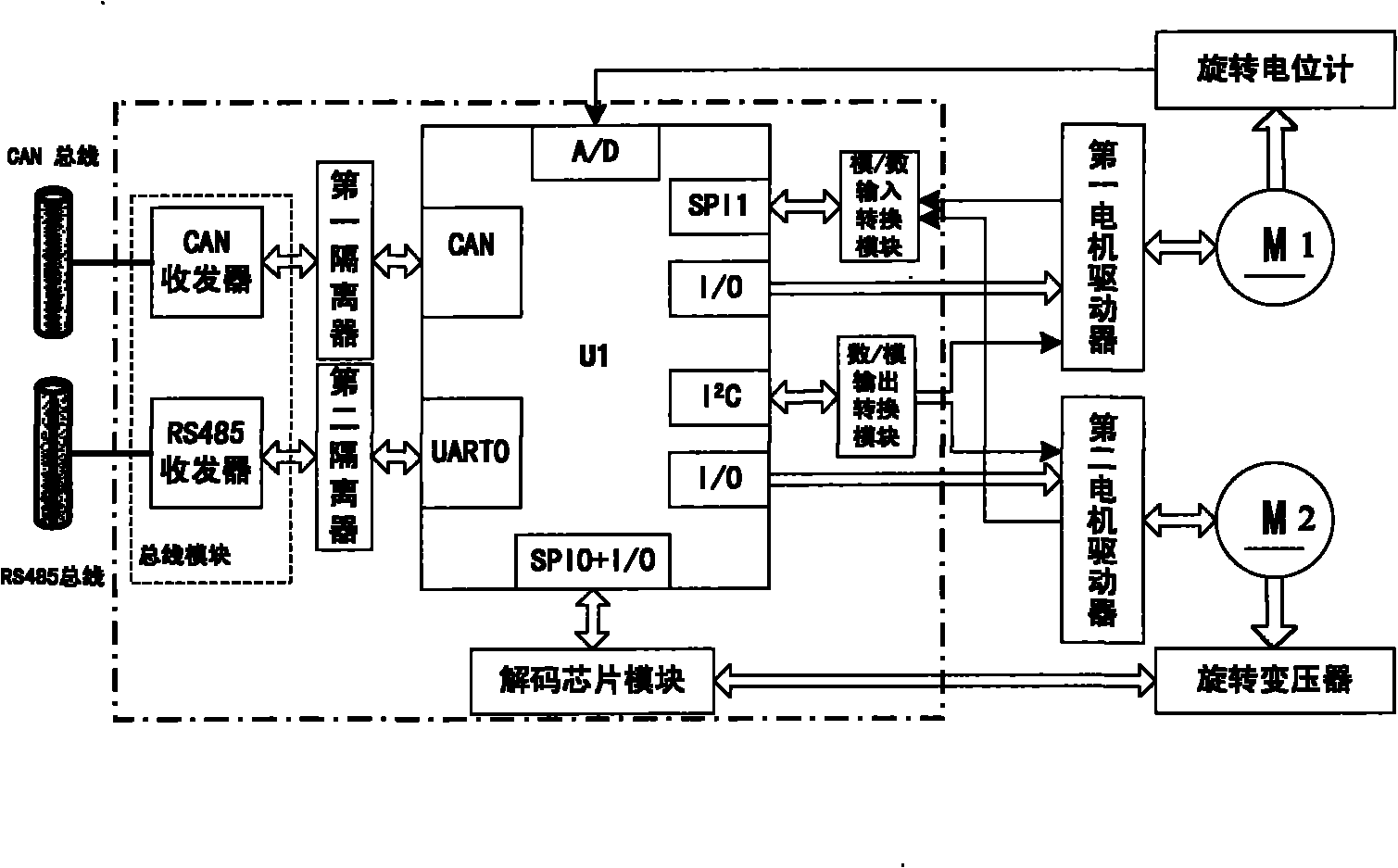
[0031] Such as Picture 1-1 As shown, a motor control device for an integrated amphibious robot with wheels, paddles and legs, the control device is connected to the main control computer through a bus module, and receives communication commands sent by the main control computer, and the control device is controlled by an ARM microprocessor Core (ARM microprocessor adopts ARM7 series);
[0032] The ARM microprocessor is connected to the CAN transceiver through the first isolator, the second isolator is connected to the RS485 transceiver, the CAN bus is connected to the CAN transceiver, and the RS-485 bus is connected to the RS485 transceiver;
[0033] The I / O terminal of the ARM microprocessor is directly connected to the first and second motors through the first and second motor drivers;
[0034] The ARM microprocessor is connected with the first and second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com