Robot limb muscle device
A robot and muscle technology, applied in the direction of manipulators, claw arms, manufacturing tools, etc., can solve the problems of high manufacturing cost, complex structure, large volume, etc., and achieve the effect of simple structure and reduced energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
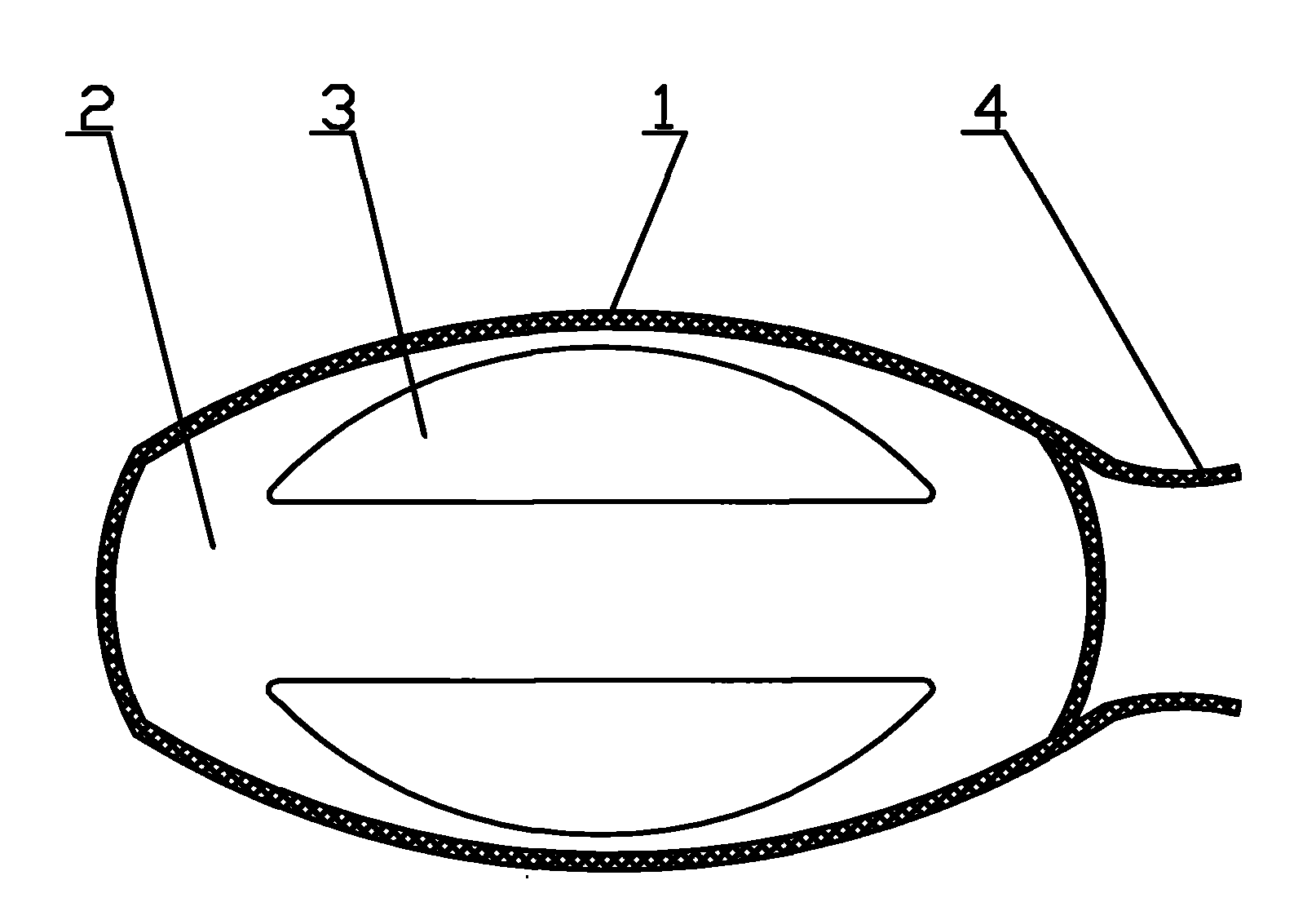
[0009] like figure 1 and figure 2 As shown, the present embodiment mainly comprises muscle skin bag 1, and muscle skin bag 1 is made of rubber with certain toughness and strength, and muscle skin bag 1 is sealed to form capsule cavity 2, is provided with a pair of electromagnet 3 opposite to the same magnetic pole in capsule cavity 2, The electromagnet is powered by a power supply, and is controlled by the control system to open, close, and change magnetic poles. One end of the muscle skin bag 1 is also provided with several connecting ends 4. The connecting ends 4 can be used to connect steel wires similar to human tendons. Control the robot finger to work.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com