Motion control device of robot for detecting environmental pollution
A motion control device and robot technology, applied in the direction of using feedback control, comprehensive factory control, electrical program control, etc., can solve the problems of no command format, large radio bandwidth and transmission power, and can not meet the requirements of small robot control, etc., to achieve Avoid blocking, avoid interference effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0033] The motion control device of the environmental pollution detection robot of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
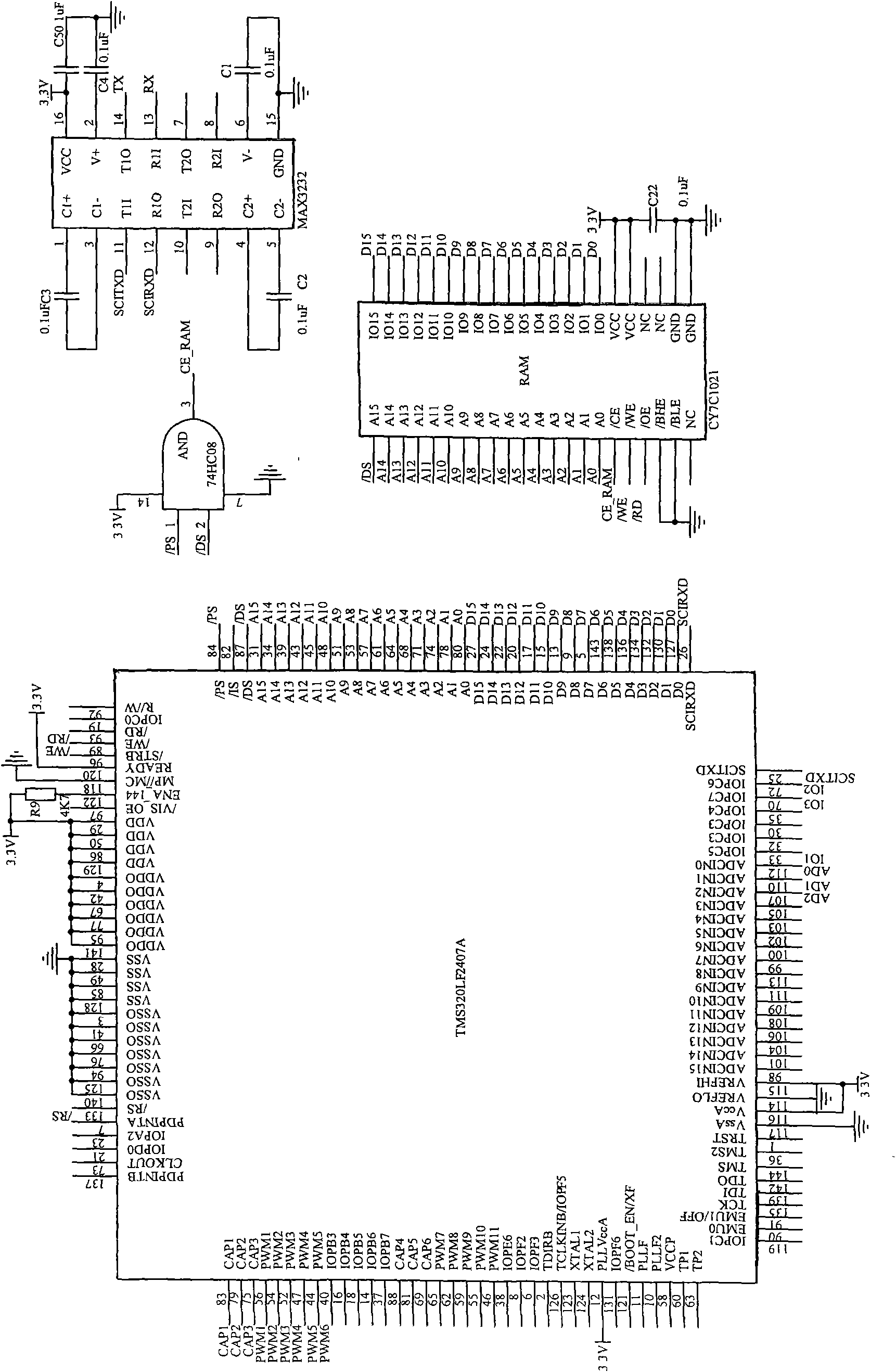
[0034] like figure 1As shown, a motion control device for an environmental pollution detection robot consists of a motor drive module 1, a motor control module 2 with a motor signal acquisition function, a wireless communication module 3, an embedded central processing unit module 4, and a main single-chip microcomputer module 5. It is composed of an image acquisition module 6 with a multi-screen split function and a sensor acquisition module 7 . The motor drive current output terminal of the motor drive module 1 is connected to the power supply input terminals of the motors of the left and right wheels and the front guide arm to provide drive current for the motors. The motor drive signal output terminal of the motor control module 2 is connected to the motor drive ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com