Miniature multifunctional human body attitude intelligent detecting instrument and method
A technology of human posture and intelligent detection, applied in the direction of instruments, measuring devices, measuring acceleration, etc., can solve the problems of complex composition and large-scale equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
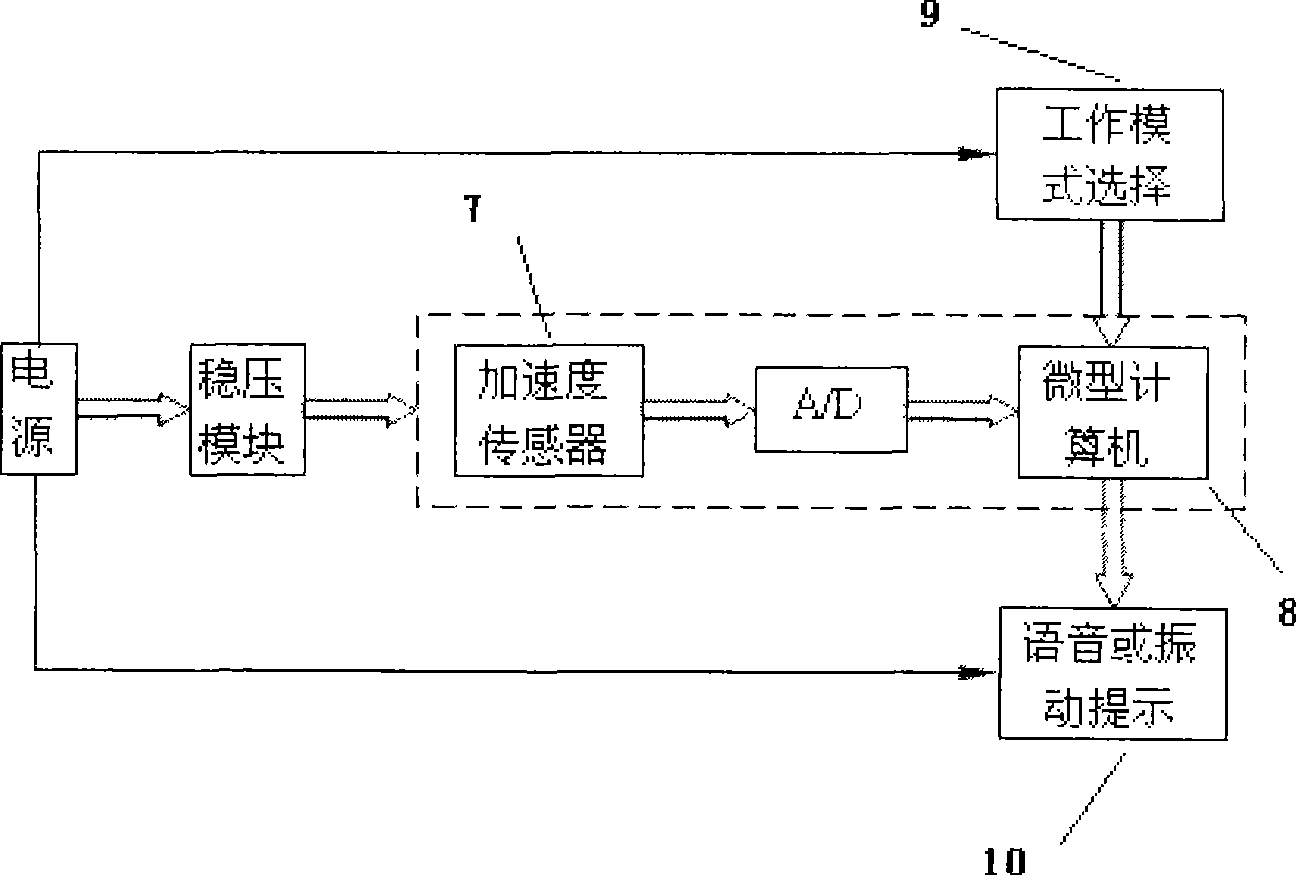
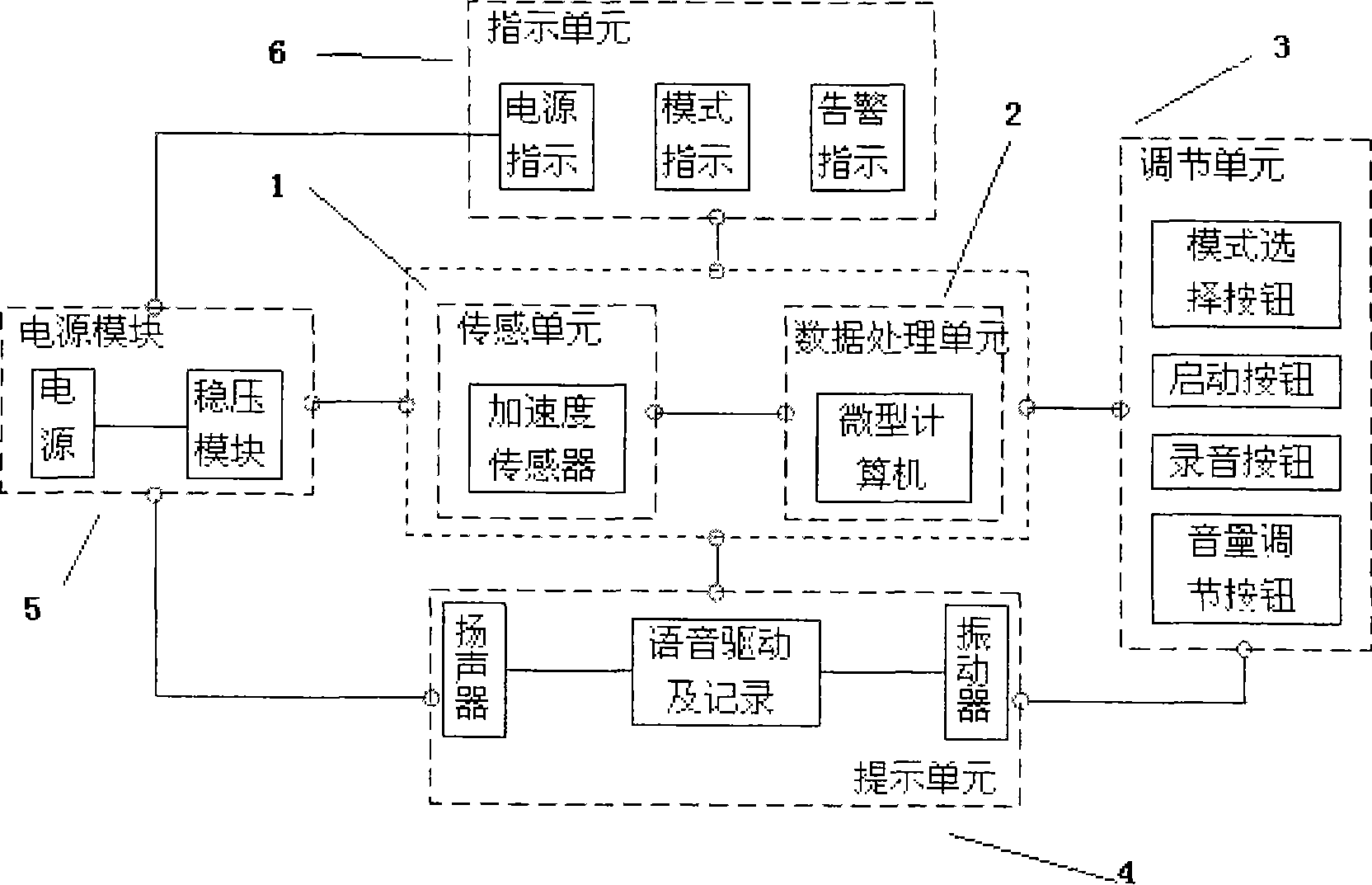
Method used
Image


Examples
Embodiment 1
[0042] Judgment and detection of exercise mode:
[0043] The current state of motion can be judged by measuring the horizontal acceleration and vertical acceleration values. Horizontal acceleration can directly reflect the speed of movement, but it is not reliable to judge movement solely by this measurement value, for example, it cannot be accurately judged when the subject is riding a bicycle. At this time, it can cooperate with the measurement of vertical acceleration, because people will be accompanied by body undulations during exercise, and the frequency and amplitude of undulations will also change with the exercise state. Therefore, by combining the measured values of the horizontal and vertical accelerations, the current motion state of the subject can be judged more accurately.
[0044] When both of them change in a small range close to zero, it is judged to be basically in a static state; when the horizontal movement speed is not large (for example: <1.0m / s), and...
Embodiment 2
[0046] Detection of pace and frequency:
[0047] For parameter detection during walking or running, the most critical parameters are speed and frequency. This embodiment will specifically provide methods for implementing the detection of two parameters. Place the tester on the back side of the lumbar spine, because the lumbar spine is the most stable during exercise, and it is the most suitable detection point to measure the pace. Because the measurement uses an acceleration sensor, the speed information needs to be calculated, the specific formula is as follows:
[0048] v=v 0 +∫ t adt
[0049] where: v 0 is the initial velocity at each measurement moment, and a is the measured horizontal acceleration value. Since this measurement is performed continuously, v 0 It is the speed value at the previous moment, which is a known quantity, and t can be set according to needs, taking one or more fluctuation times. It should be pointed out that the speed calculated according t...
Embodiment 3
[0053] Military posture detection:
[0054] This embodiment mainly involves the detection of soldiers' standing posture, sitting posture and walking posture and upper body posture. Wear the detector on the upper body of the subject to ensure that it can move synchronously with the upper body. In this embodiment, the upper body is regarded as a rigid body, and the movement of any point on it can be regarded as the movement of the entire rigid body. With the measuring instrument as the origin, a spatial Cartesian coordinate system is established by using three mutually perpendicular acceleration axes. In low-intensity motion or relatively static state, by measuring the static acceleration changes in the three-axis direction, determine the relative relationship between the detected attitude coordinate system and the initial attitude, and judge the rationality of the current attitude. The attitude can be determined by the following formula:
[0055] θ xy =arccos(a x +a y ) / g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com