


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
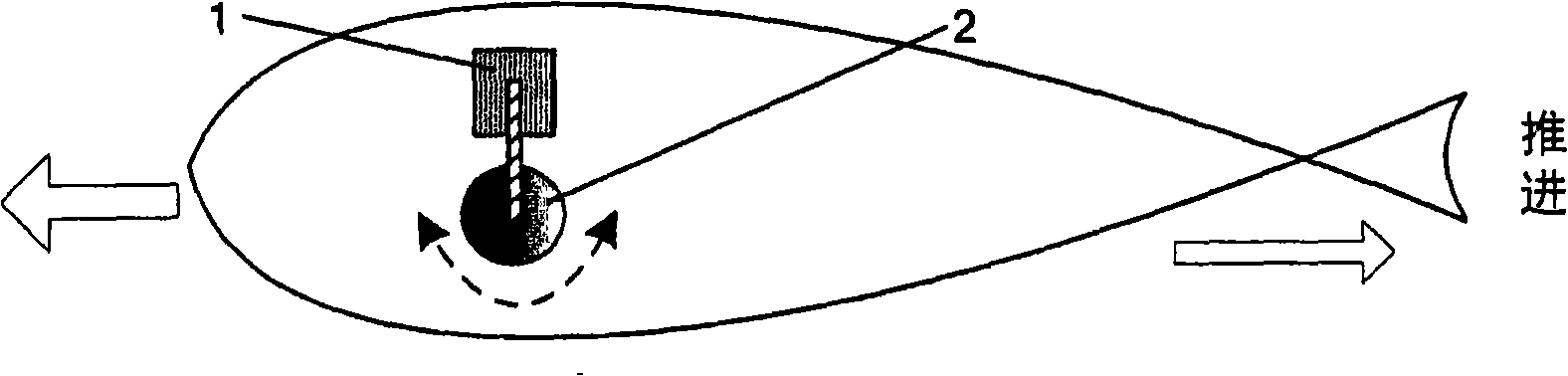
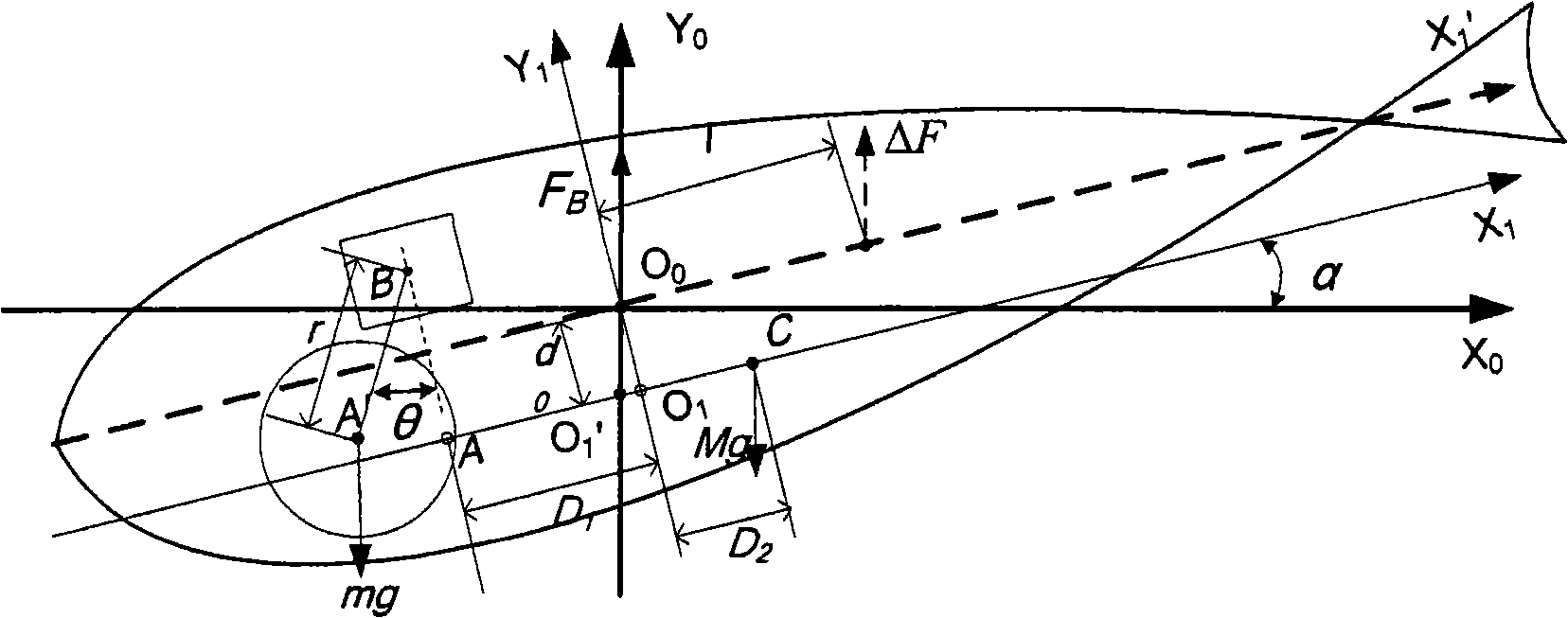
Bionic machine fish depth control method based on mass centre changing
A technology of depth control and robot fish, which is applied in the field of bionic robot fish to achieve the effect of precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0051] The method for controlling the depth of the bionic robot fish based on the change of the center of gravity provided by the present invention is applied to the control of a three-joint bionic robot fish imitating the trevally fish. The center of gravity changing device was made using a copper slider weighing 138g and a GWS Naro servo. The bionic robot fish is 0.41 meters long and weighs 890g. The three joints are controlled by three steering gears. The depth control method runs on the microcontroller ATmega128 inside the robot fish, the current depth is provided by the Honeywell 40PC015 sensor, and the PID controller parameter K D 、K I and K D 20, 10 and 0.01, respectively. Using the depth control method based on the change of the center of gravity provided by the present invention, the bionic robotic fish can move at a fixed depth and the effect is satisfactory. The depth change curve during the motion of the bionic robotic fish when the water depth is 30cm is as fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com