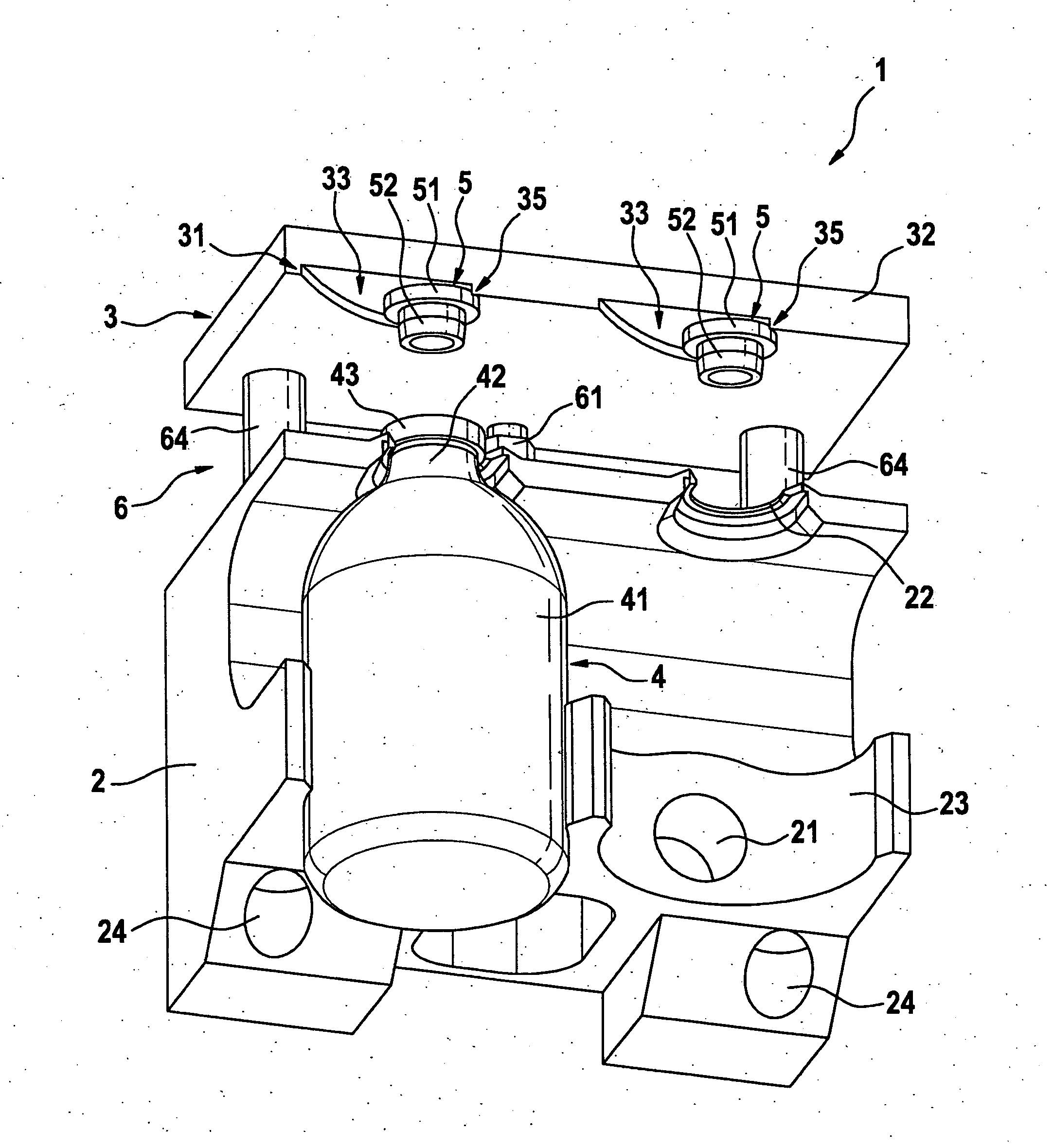
[0003]The gripping device of the invention having the characteristics of claim 1 has the
advantage over the prior art that it can be produced economically because of its simple construction. This makes flexible, economical production of the gripping device possible for various containers and closures. Moreover, the gripping device is designed as a module and thus forms a closed-off modular component of a
production chain. This
modularity permits a flexible variation of the gripping device, without having to change the
production chain upstream or downstream of the gripping device. In addition, the design of the gripping device as a module makes it possible for the entire gripping device to be moved within, the
production chain during the closing operation. As a result, not only is production time saved, but one production step, which is provided only for conveying the containers, is integrated with the closing operation. This is attained according to the invention in that the gripping device includes a container
pickup device and a closure
pickup device. According to the invention, it is provided that the container
pickup device can securely hold a filled container or
bottle. The closure pickup device is intended for holding the closure. A connection element according to the invention on the one hand integrates the closure pickup device with the container pickup device and on the other enables a
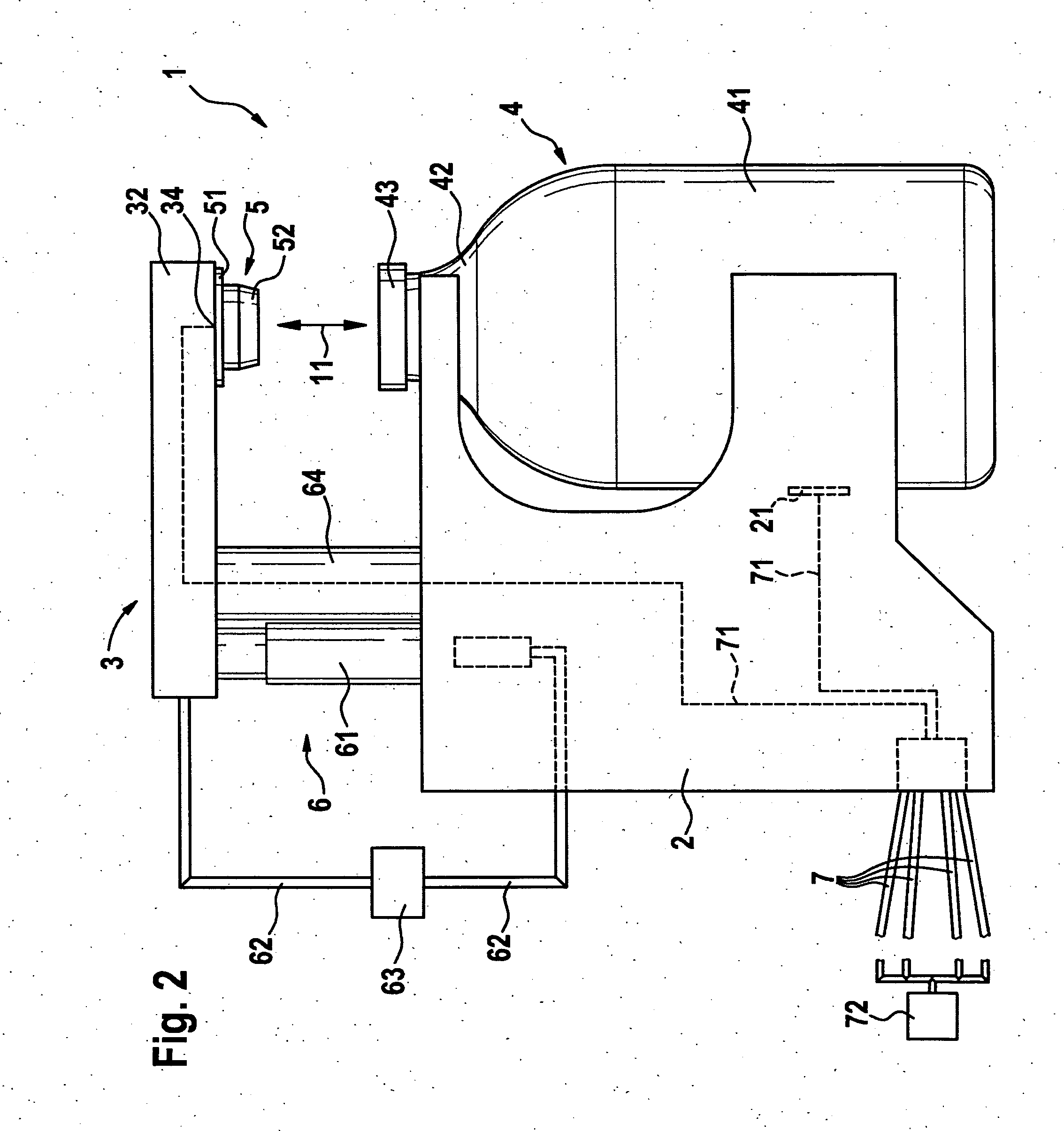
relative motion between the container pickup device and the closure pickup device. This
relative motion serves to place the closure on the container. The construction according to the invention enables a gripping device to pick up a container, for instance from a filling
station. Simultaneously with the gripping, or before or after the gripping of the container, a furnished closure is picked up by the closure pickup device. According to the invention, after and / or during the picking up operations, the gripping device moves to a position in the production chain in which the closed containers are to be set down. In other words, the gripping device conveys the containers within the production chain. During this conveying operation, the gripping device executes the
relative motion between the container pickup device and the closure pickup device and closes the container with the closure. Thus the container is conveyed and closed simultaneously.
[0005]Preferably, the connection element includes a guide element. This guide element executes the relative motion between the container pickup device and the closure pickup device and thus makes the precise-fitting placement of the closure onto the container possible.
[0006]The embodiment of the guide element as a linear guide element is also preferred, for placing the closures linearly on the container opening. As a result, tilting of a stopper during its introduction into the container opening, for instance, is averted. Preferably, the linear guide element includes at least one rod, and the relative motion is guided by this rod. For the form of the rod, either a hollow or a
solid cylinder and an angular profile are conceivable.
[0007]To pick up a closure while the gripping device is in constant motion, the closure pickup device advantageous includes a closure towaway device. As a result, the gripping device can remove a furnished closure while the gripping device is moving in the production chain, and thus without a loss of time.
[0008]In an especially preferred embodiment, the closure towaway device includes a surface with an integrated pocket. The form and dimensions of the pocket correspond to the external dimensions of the closure. By means of a linear or curved opening in the pocket, the gripping device, while it is in motion, can pick up a closure and put it in the pocket.
[0009]Also preferably, intake openings are embodied on the container pickup device and / or the closure pickup device. By subjecting these intake openings to underpressure, a secure hold of the container and closure in the gripping device is ensured. Moreover, by withdrawing the underpressure, or by subjecting the intake openings to
overpressure, two things can be achieved: First, the closure can be set on the container, and second, the container can be let go from the container pickup device at a certain time and thus at a certain position.
[0010]It is also provided according to the invention that the intake openings of the container pickup device and the closure pickup device each be supplied independently with underpressure. As a result, the underpressure at one opening is independent of a possible
pressure increase at the other opening. For instance, if because of a malfunction the closure pickup device fails to pick up a closure, or if the closure is let go from the device, the pressure rises at the intake opening of the closure pickup device. Because of the separate underpressure supply, according to the invention, for the container pickup device, the underpressure at the intake opening of the container pickup device remains constant, and the container is not let go from the gripping device. Securing of the container in this way by means of the separate underpressure supply is especially advantageous if the contents of the container, if the are spilled, could damage the surrounding machines or could harm people.
[0011]Lowering the closure pickup device for placing the closure onto the container is also advantageous. As a result, the container pickup device is not moved relative to the gripping device, and an unnecessary acceleration of the contents of the container is avoided. This for instance prevents liquid contents from sloshing over. The lowering is preferably done pneumatically. A use of the above-described underpressure is conceivable for this. However, the drive of the relative motion is not limited to pneumatic means, and a mechanical or hydraulic drive is equally conceivable.
[0012]It is also provided according to the invention that the gripping device can pick up at least two containers and accordingly also at least two closures. As a result, the gripping device can be adapted to the pacing of the production chain, and the effectiveness of the production can be optimized.
[0013]Also preferably, a recess in the container pickup device is formed to correspond to the container, which ensures a form-locking pickup of the container. This form lock can either improve the hold of the container in combination with the intake opening, or it can replace the intake opening.
[0014]The use of a stopper as the closure is also preferred. Then an economical rubber stopper, for instance, can be pressed into the container by the gripping device of the invention.
[0015]According to the invention, a
manipulator unit for picking up containers and closures and for closing the containers is also provided. This
manipulator unit includes at least one gripping device according to the invention. Thus the
manipulator unit can move the gripping device within the production chain from the pickup positions for containers and closures to the deposition position for closed containers. In addition, the unit can include the underpressure sources for picking up the containers and closures by suction and the pressure source for the pneumatically driven closing operation. As an alternative to this, it is provided that the manipulator unit also conducts a pressure and underpressure supply from an
external source to the gripping device. The use of a freely programmable
robot or
robot arm as the manipulator unit is especially advantageous. The
robot makes a flexible design of the course of motion of the gripping device within a production chain possible.
[0016]It is also provided according to the invention that the manipulator unit be driven inside an insulator, the insulator being disposed like a hood element over the gripping device. Thus closing the containers in an
inert gas or in a vacuum is also possible.
[0017]The use of the gripping device and the manipulator unit in the
pharmaceutical industry is also preferred. Especially in the range of small- and medium-sized batches, the gripping device of the invention and the manipulator unit of the invention afford a novel possibility of flexible design of the production chain.
[0018]Alternatively to picking up the closure by means of a
towing motion, it is also advantageous to make the pickup of the closure intermittent. That is, the gripping device stops, picks up a closure, and then moves onward.

 Login to View More
Login to View More  Login to View More
Login to View More