Articulate and swapable endoscope for a surgical robot
a robot and endoscope technology, applied in the field of endoscopes, can solve the problems of further attenuation of unusable motion, and achieve the effects of reducing the size of the robot, facilitating the operation, and facilitating the operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
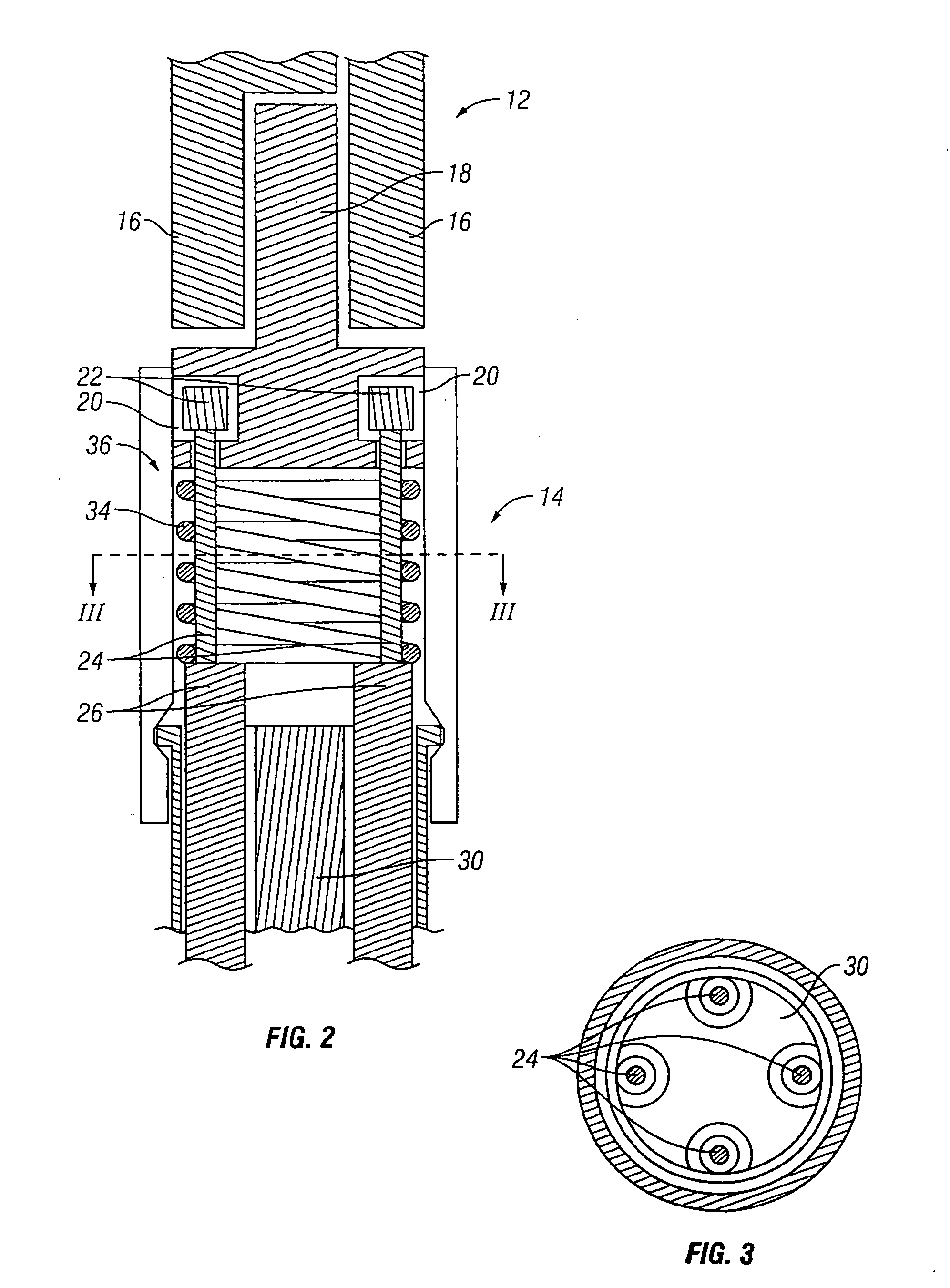
[0064] As used herein, “end effector” refers to an actual working distal part that is manipulable by means of the wrist member for a medical function, e.g., for effecting a predetermined treatment of a target tissue. For instance, some end effectors have a single working member such as a scalpel, a blade, or an electrode. Other end effectors have a pair or plurality of working members such as forceps, graspers, scissors, or clip appliers, for example. In certain embodiments, the disks or vertebrae are configured to have openings which collectively define a longitudinal lumen or space along the wrist, providing a conduit for any one of a number of alternative elements or instrumentalities associated with the operation of an end effector. Examples include conductors for electrically activated end effectors (e.g., electrosurgical electrodes; transducers, sensors, and the like); conduits for fluids, gases or solids (e.g., for suction, insufflation, irrigation, treatment fluids, accessor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com