Wall gecko imitation mini-robot
A micro-robot technology, applied in the direction of micro-manipulators, manipulators, program-controlled manipulators, etc., can solve the problems of wall-climbing robots such as small size, difficult processing, and poor flexibility, and achieve the effects of strong concealment, low cost, and reliable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
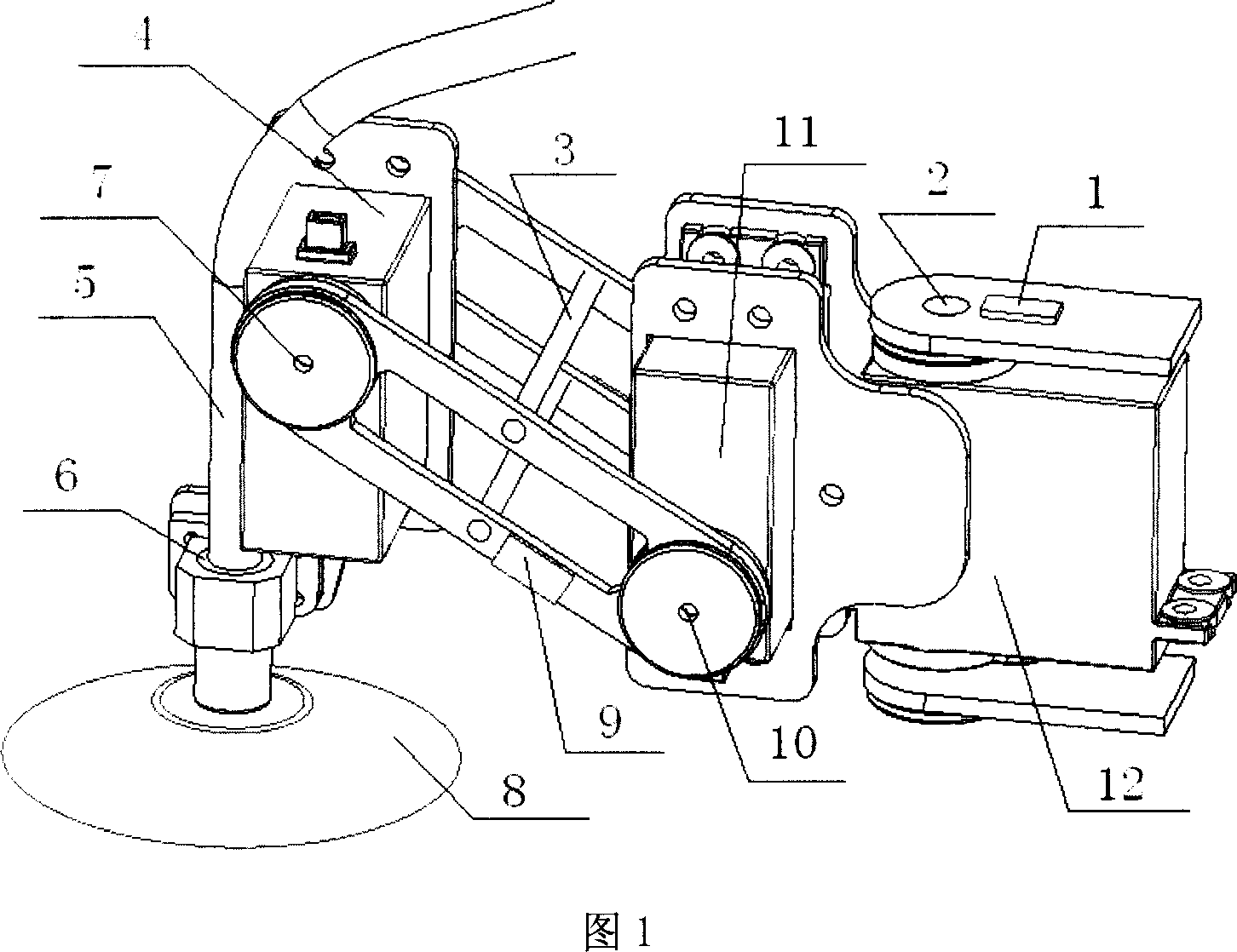
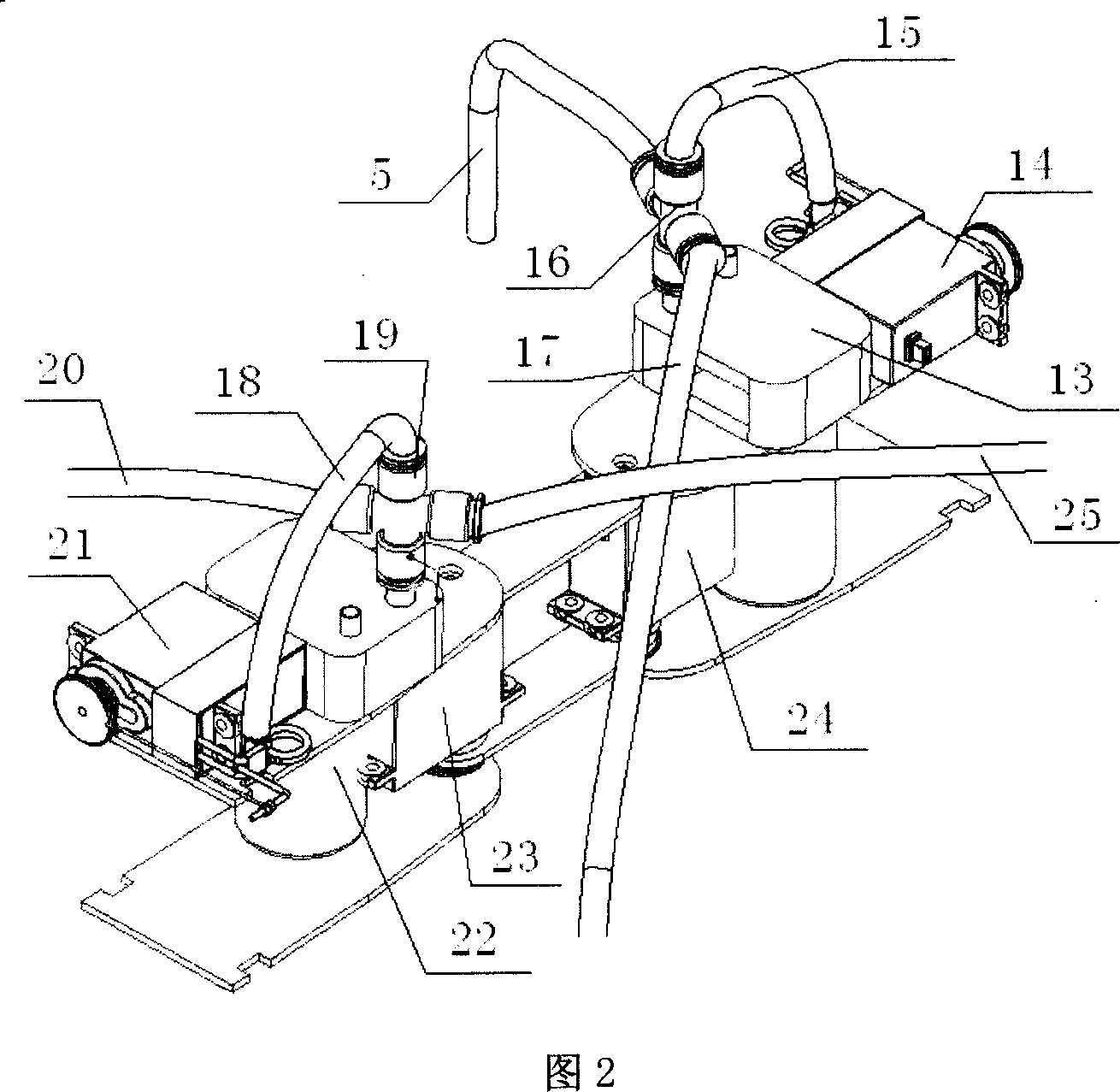
[0050] Below in conjunction with accompanying drawing, structure and working process of the present invention are further described:
[0051] The present invention includes a body assembly structure and a single-leg structure, four sets of single-leg structures are installed on the body assembly structure, and each set of two single-legs on the diagonal has a set of negative pressure adsorption and pressure release devices; the body assembly structure includes Two waist-driven steering gears, two air pumps and two gas pressure relief devices, each air pump is connected to a gas pressure relief device and two sets of suction cups with a single-leg structure distributed diagonally through pipelines; the single The leg structure consists of a thigh, a calf and a suction cup. The calf includes a knee joint servo, and the suction cup is installed under the knee joint servo. The thigh includes a hip joint pitch motion servo, a hip joint horizontal swing servo, a hip joint pitch motio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com