Dress-able type flexible exoskeleton manipulator
An exoskeleton and manipulator technology, applied in the field of flexible exoskeleton manipulators, can solve the problems of complex mechanism, less degrees of freedom, limited operating range, etc., and achieve the effect of extending the range of motion, reducing motion restrictions, and reducing motion restrictions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] Further illustrate the present invention below in conjunction with accompanying drawing.
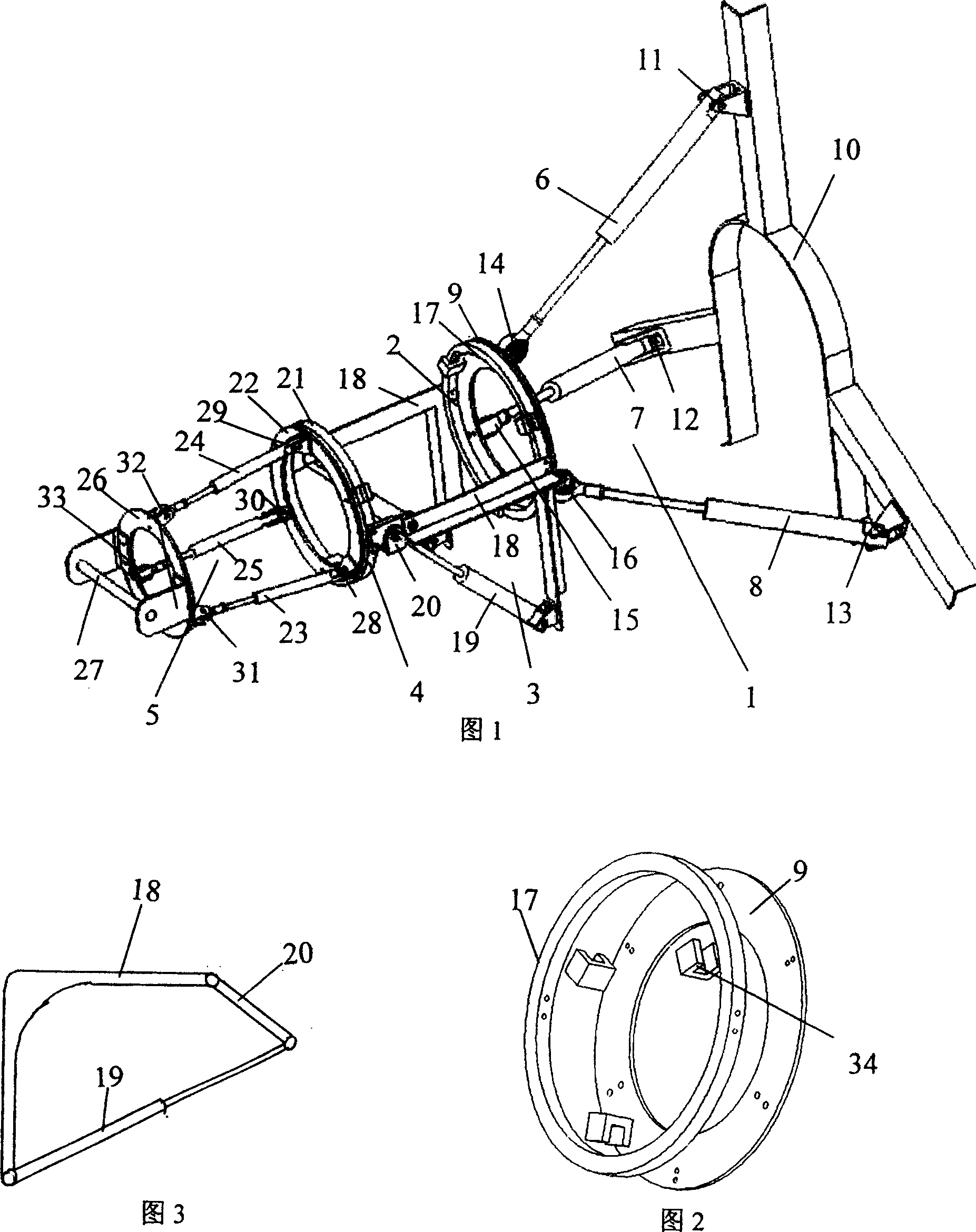
[0011] Referring to Figure 1, the wearable flexible exoskeleton manipulator includes a shoulder large 3RPS parallel mechanism 1, a shoulder slip ring mechanism 2, two elbow four-bar mechanisms 3, a wrist slip ring mechanism 4 and a wrist The small 3RPS parallel mechanism 5, the said shoulder large 3RPS parallel mechanism 1 has a U-shaped lower plane 10 and a ring-shaped upper plane 9, and the bottom end and two open ends of the U-shaped lower plane 10 are respectively fixed There are swivel hinges 11, 12, 13, and the connecting lines of these three swivel hinges form an equilateral triangle, and three spherical hinges 14, 15, 16 distributed at 120° are fixed on the annular upper plane 9, as shown in the illustration , the three hinges 11, 12, 13 on the U-shaped lower plane are connected to the cylinder body ends of the first group of cylinders 6, 7, 8 respectively, and the piston ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com