Gesture regulating wrist mechanism of robot decoupled with position mechanism movement
A mechanism motion and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex position control algorithms, simplify motion analysis and control algorithms, solve nonlinear motion coupling, and realize motion decoupling. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in further detail below in conjunction with the accompanying drawings and the specific embodiments given by the inventor according to the technical solution of the present invention.
[0014] 1. The principle of the wrist mechanism for robot attitude adjustment decoupled from the motion of the position mechanism
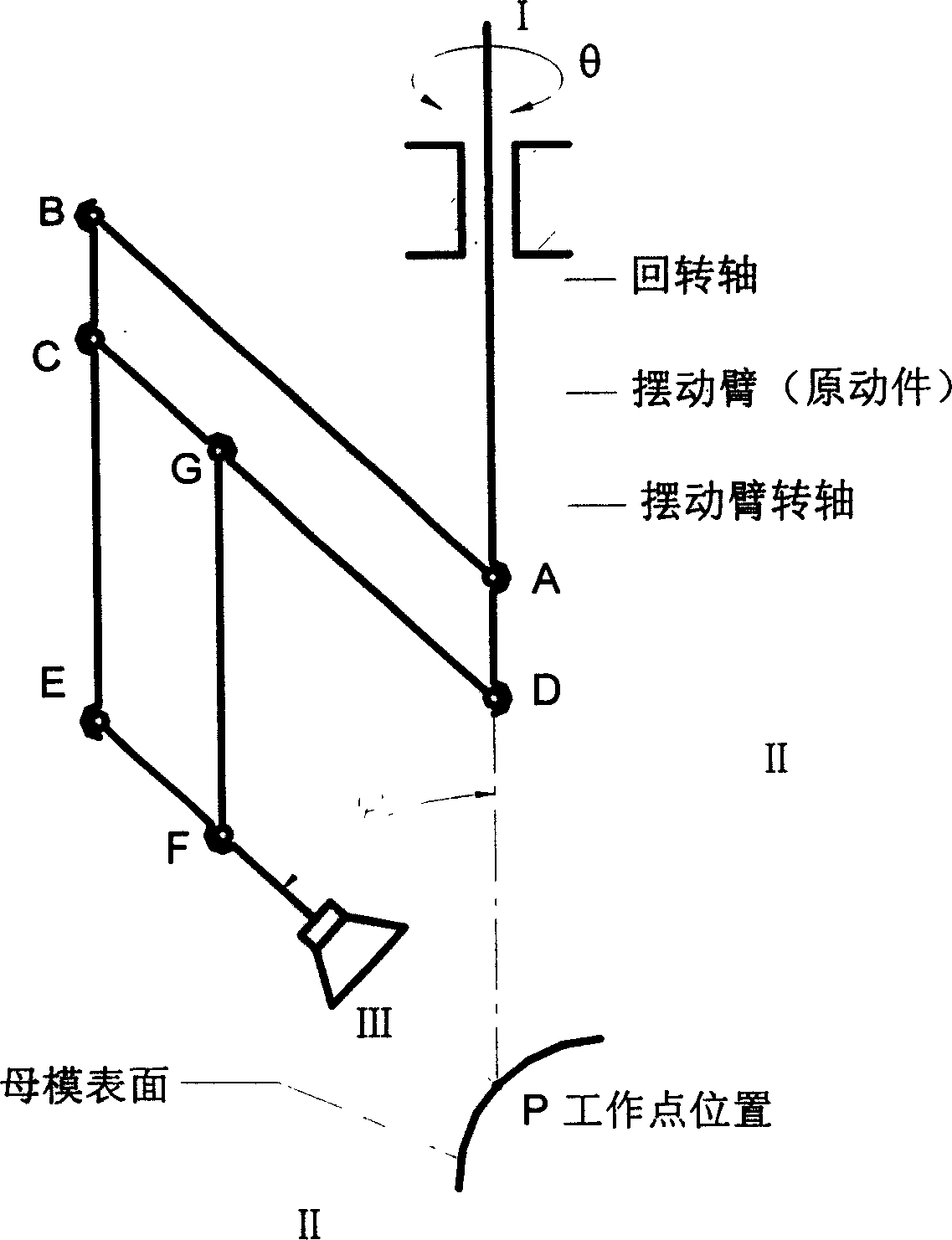
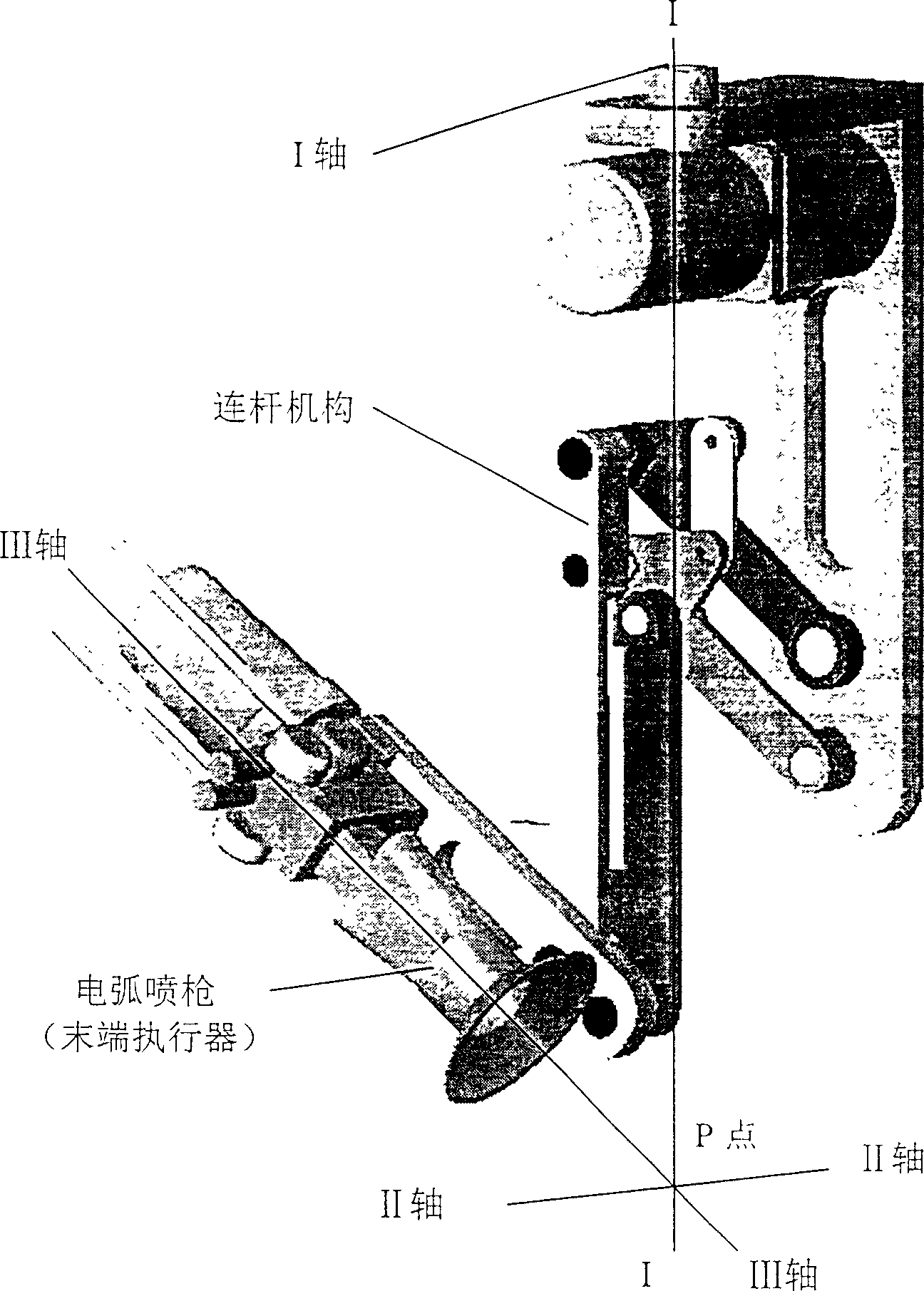
[0015] Such as figure 1 As shown, the wrist of the robot attitude adjustment is composed of the rotary axis AD and the link mechanism ABCEFGD, and has two degrees of freedom. The end effector in the figure is the spray gun of the metal arc spraying rapid prototyping robot. According to the needs of the end effector, the degree of freedom of rotation around the III-axis axis (parallel to the EF rod of the linkage mechanism) can be added to form a three-degree-of-freedom wrist.
[0016] The basic structural form of the link mechanism ABCEFGD adopted in the present invention is composed of five movable members and seven r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com