Lane line detection method and device based on neural network, equipment and medium
A lane line detection and neural network technology, applied in biological neural network models, neural architectures, instruments, etc., can solve problems such as data errors and low accuracy of lane lines, reduce errors, improve accuracy and reliability, and improve The effect of efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0049] see figure 1 .
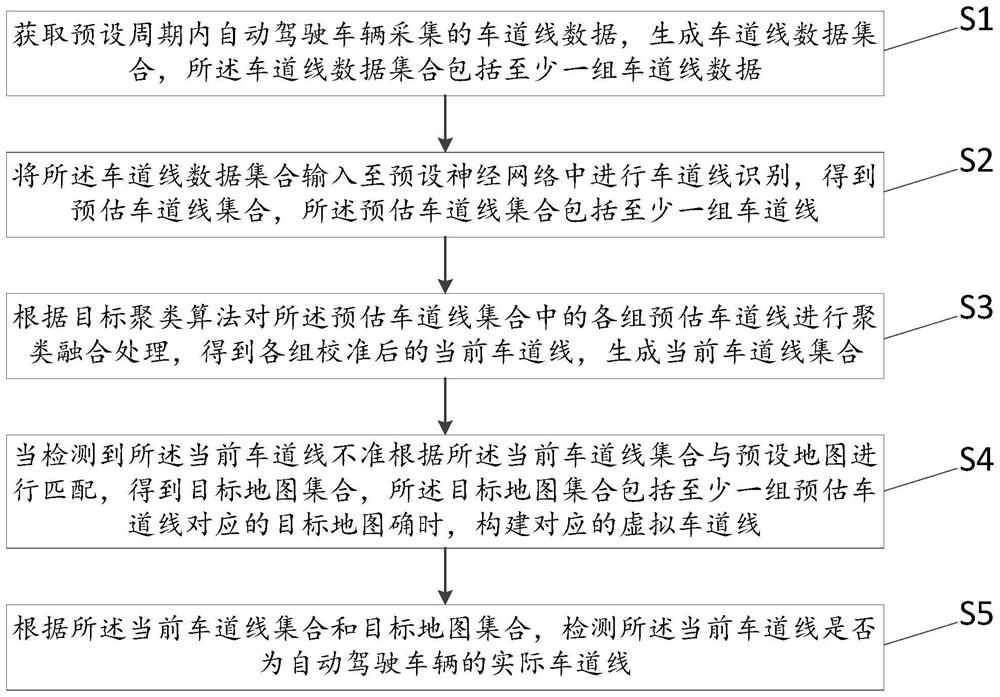
[0050] like figure 1 As shown, this embodiment provides a method for detecting lane lines based on a neural network, which at least includes the following steps:
[0051] S1. Acquire lane line data collected by an autonomous vehicle within a preset period, and generate a lane line data set, where the lane line data set includes at least one set of lane line data;
[0052] S2, inputting the lane line data set into a preset neural network for lane line recognition to obtain an estimated lane line set, where the estimated lane line set includes at least one group of lane lines;
[0053] S3, performing clustering and fusion processing on each group of estimated lane lines in the set of estimated lane lines according to the target clustering algorithm, to obtain the current lane lines after calibration of each group, and generate a set of current lane lines;
[0054] S4. Matching the current lane line set with a preset map to obtain a target map set, wher...
no. 2 example
[0096] see figure 2 .
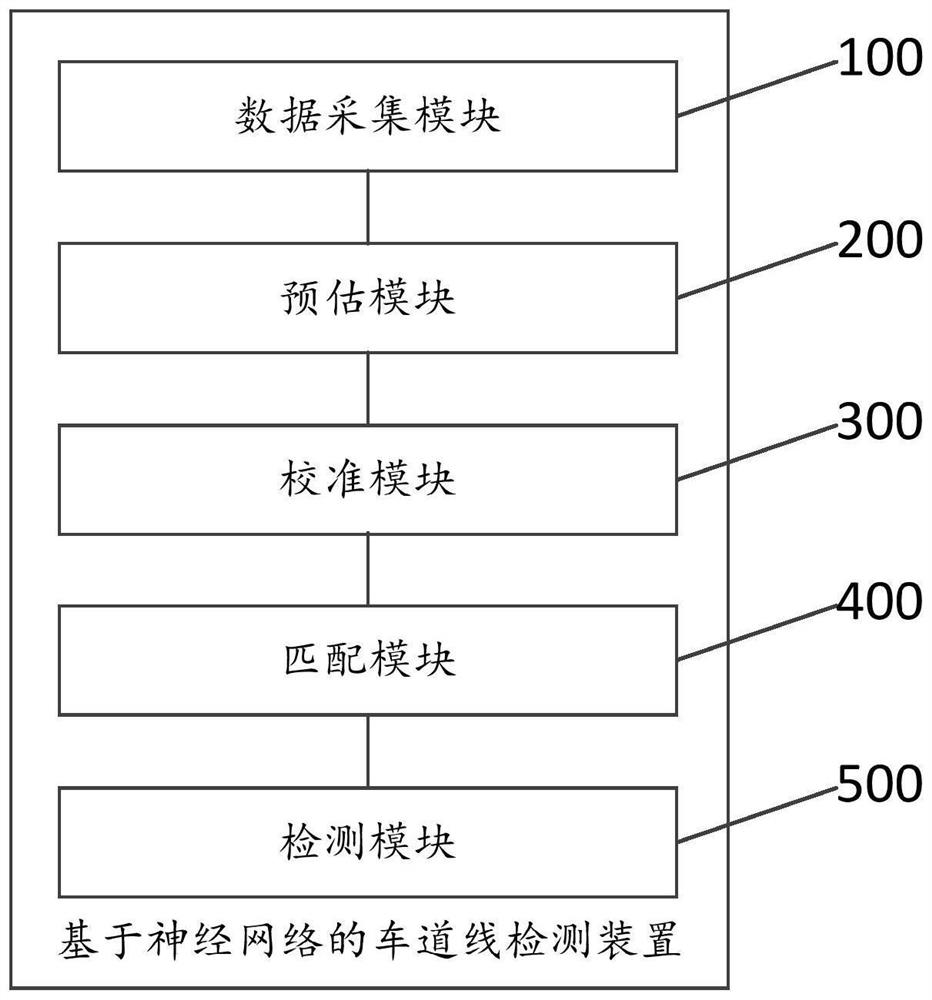
[0097] like figure 2 As shown, this embodiment provides a device for lane line detection based on a neural network, including:
[0098] A data collection module 100, configured to acquire lane line data collected by the autonomous driving vehicle within a preset period, and generate a lane line data set, wherein the lane line data set includes at least one set of lane line data;
[0099] An estimation module 200, configured to input the lane line data set into a preset neural network for lane line recognition, and obtain an estimated lane line set, where the estimated lane line set includes at least one set of lane lines;
[0100] The calibration module 300 is configured to perform clustering and fusion processing on each group of estimated lane lines in the set of estimated lane lines according to a target clustering algorithm, obtain the current lane lines after calibration of each group, and generate a set of current lane lines;
[0101] A match...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com