Rope-driven flexible double-joint bionic crab and control method
A control method, bionic crab technology, applied in the field of bionics, can solve problems such as single direction of movement, easy fatigue of flexible bones, difficult to control the number of cables, etc., to achieve the effect of simplifying the production process, simple control method, and reducing production difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be further described below in conjunction with the accompanying drawings and embodiments;
[0072] A rope-driven flexible double-joint bionic crab comprises three parts: a foot end, a body and a shell; the four foot ends are respectively connected with the four ends of the body; the shell is connected directly above the body;
[0073] The body includes four steering wheels, a PCB board, four steering gears, four steering gear arms, and two trunks; the two trunks are connected to both sides of the PCB board; the four steering gears are respectively installed at the four corners of the trunk The steering gear bearing slot of the steering gear; the steering gear arms are respectively connected to the output gear of the steering gear; the steering wheel is respectively nested on the steering gear arm;
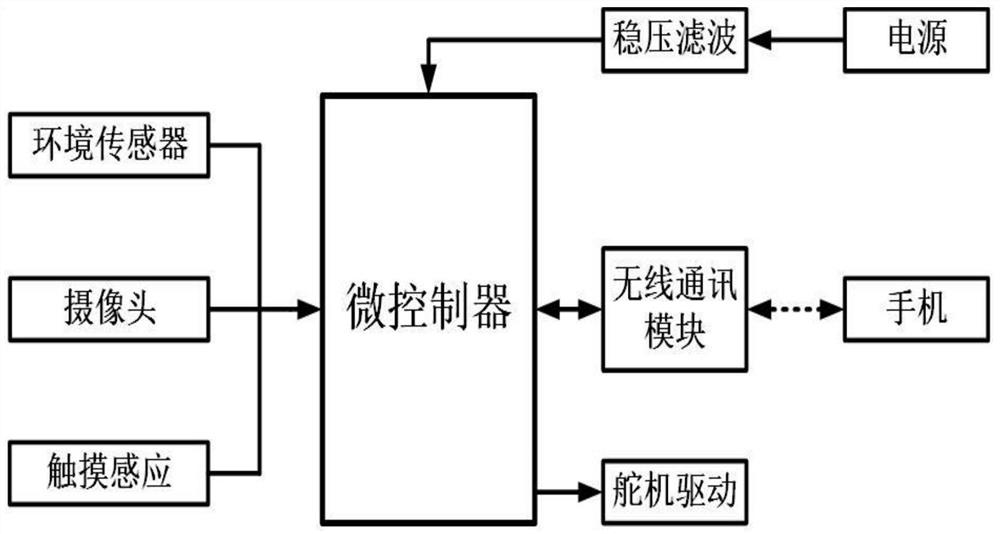
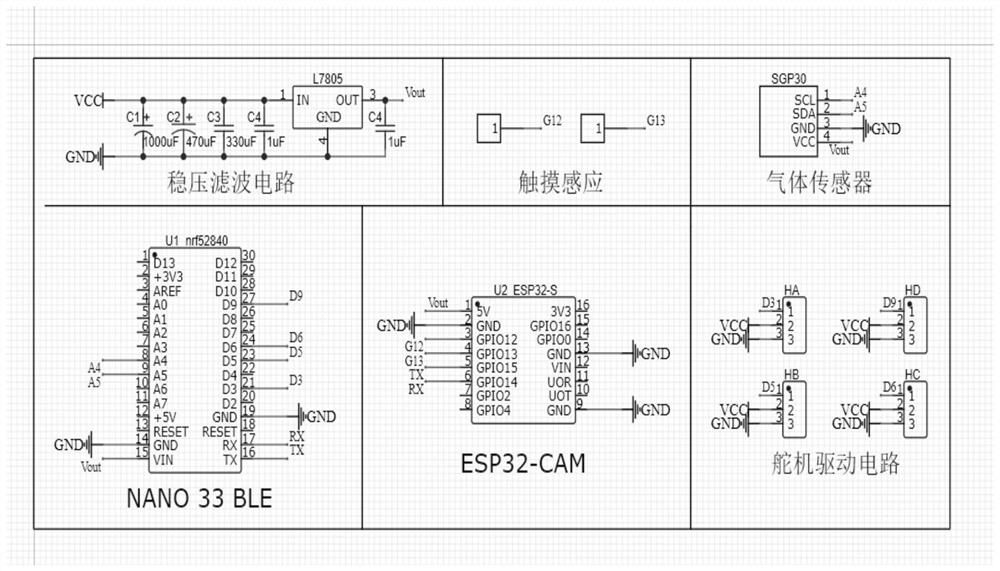
[0074] The PCB board includes a microcontroller, a battery, a capacitor, a three-terminal voltage regulator and a gas sensor; the microcontroller ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com