Unmanned vehicle path planning algorithm based on improved RRT algorithm
A technology for unmanned vehicles and path planning, applied in vehicle position/route/height control, motor vehicles, two-dimensional position/course control, etc., can solve the problems of unsatisfied vehicle kinematics constraints, long search time, and large memory usage and other issues, to achieve the effect of good engineering practical value, less memory usage, and shortened path length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0021] The specific embodiments of the present invention will be further described below with reference to the accompanying drawings and technical solutions.
[0022] An unmanned vehicle path planning algorithm based on improved RRT algorithm, the steps are as follows:
[0023] Step 1: Initialize the map space, the pose of the starting point and the target point, the basic parameters of the car, the algorithm parameters and the obstacle information in the environment;
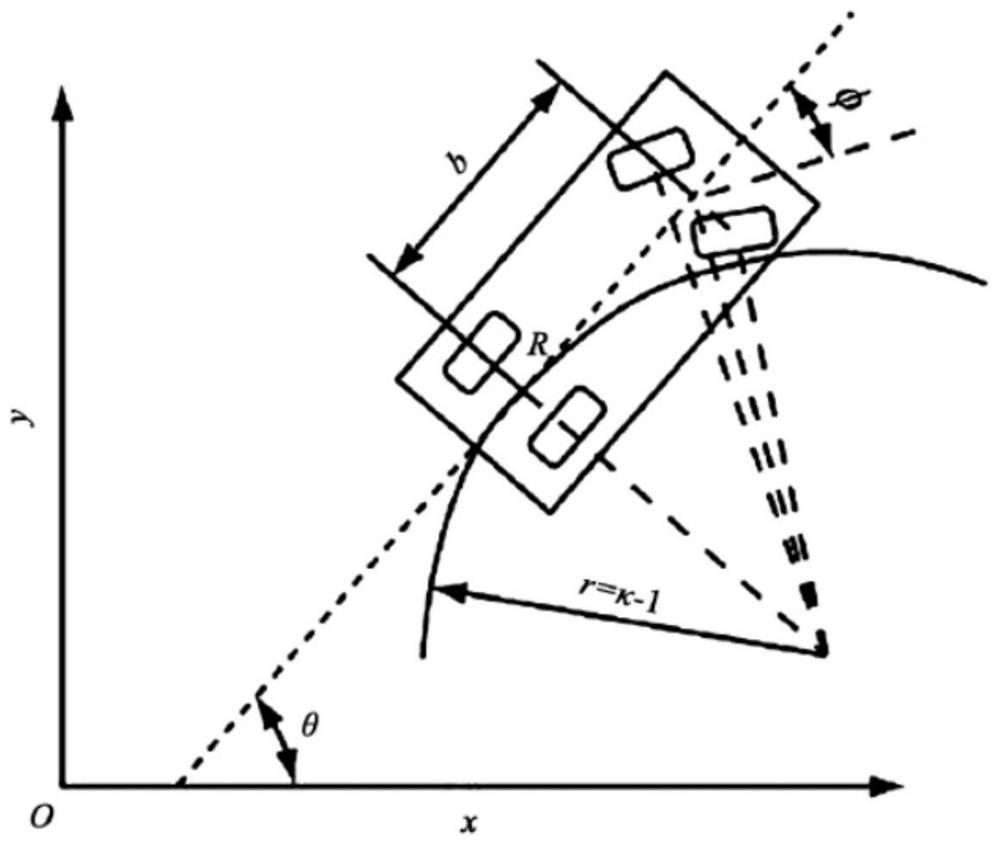
[0024] Step 1: Initialize the map space and enter the starting point X of the unmanned vehicle init and end point X goal And the obstacle information distributed in the environment; input the basic parameter information of the unmanned vehicle, including the minimum turning radius R min , maximum front wheel angle and wheelbase L, so that the vehicle can satisfy the kinematic constraints during driving. The schematic diagram of the kinematic constraints is shown in figure 2 shown. front wheel angle les...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com