Self-adaptive tracking control method and system for yaw channel dynamics of unmanned helicopter
An unmanned helicopter and adaptive tracking technology, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve problems such as difficult analytical solutions, causal contradictions of control laws, etc., to ensure that the closed-loop signal is bounded and Effects of Practical Output Tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0115] The yaw channel dynamics of unmanned helicopters have the characteristics of high relative order and high uncertainty. With the increasing performance requirements of modern aircraft with high maneuverability, it is necessary to improve the yaw control performance of unmanned helicopters. The following takes the dynamic model of the yaw channel of the unmanned helicopter as an example to show the applicability of the proposed method in the actual system. (When the unmanned helicopter is hovering and flying at low speed, the torque mainly comes from the main rotor and tail rotor. Simplify the damping of the fuselage and vertical tail, and the dynamic equation of the yaw channel of the unmanned helicopter can be described as) Consider the following without The dynamic equation of the yaw channel of the human helicopter:
[0116]
[0117] in and r are the yaw angle and yaw angular velocity of the helicopter, respectively, I zz is the inertia of the helicopter around...
Embodiment 3
[0195] Consider the following system model:
[0196] y(t)=θ *T f(y(t-1), y(t-2), y(t-3), u(t-3)), (45)
[0197] in is the system output, is the system input,
[0198]
[0199] in:
[0200] This means that the order n=3 and the time delay d=3 are shown. Assume represents theta * the fourth element in , then:
[0201]
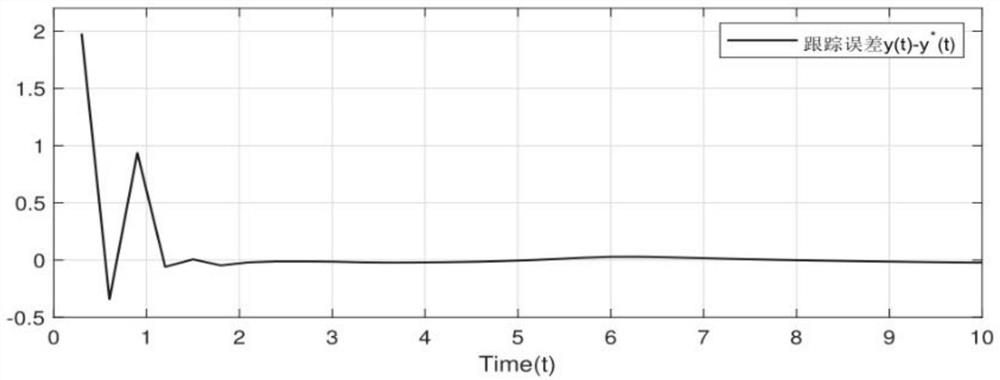
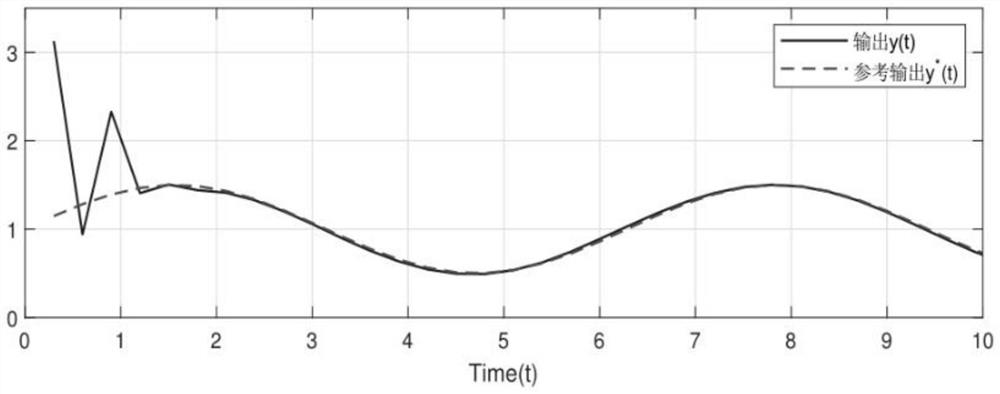
[0202] Based on (46) and (48), it can be verified that the input-output delay of the simulation example (45) is 3 and depends on unknown parameters Based on this, for the bounded closed interval group in (7) selection, just ensure that Choosing on the interval (0, 1.6] ensures that inequality (7) always holds. In this example, we choose Based on the selection of closed interval groups in the parameter update law (5), the specific analytical form of the projection correction term g(θ(t), h(t)) can be determined, and the simulation example (31) is verified as a minimum phase system.
[0203] Design the adaptive control law: From (46) and ...
Embodiment 4
[0210] This embodiment also provides an adaptive tracking control system for the yaw channel dynamics of the unmanned helicopter, including:
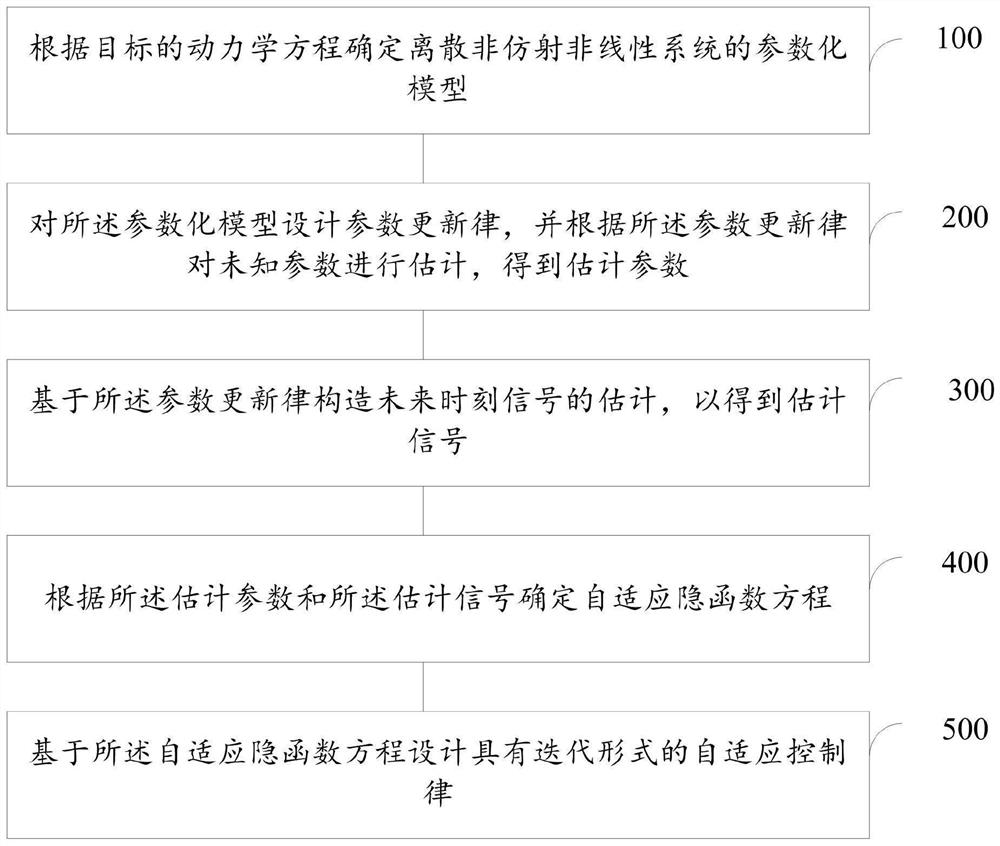
[0211] A model building unit for determining the parametric model of the discrete non-affine nonlinear system according to the dynamic equation of the target;
[0212] a parameter estimation unit, configured to design a parameter update law for the parameterized model, and estimate unknown parameters according to the parameter update law to obtain estimated parameters;
[0213] a signal estimation unit, configured to construct an estimation of a signal at a future moment based on the parameter update law to obtain an estimated signal;
[0214] an equation determining unit, configured to determine an adaptive implicit function equation according to the estimated parameter and the estimated signal;
[0215] A control law construction unit, used for designing an adaptive control law with an iterative form based on the adaptive implicit fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com