Three-dimensional target automatic positioning and attitude determination method based on monocular optical photography and application thereof
A three-dimensional target and automatic positioning technology, applied in the field of visual optical navigation, can solve the problems of high cost, increased system operation complexity, and increased cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
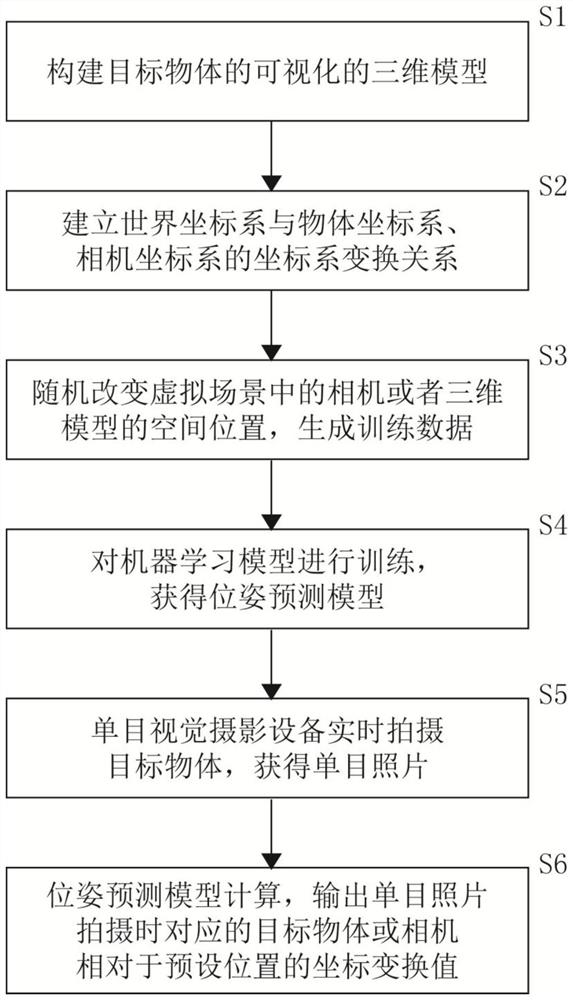
[0070] Embodiments of the present invention provide a method for automatic positioning and attitude determination of three-dimensional objects based on monocular optical photography, simulating the navigation process of minimally invasive knee arthroscopic surgery. The flow chart of this method is as follows figure 1 As shown, it includes the following steps:
[0071] S1: Using pre-segmented MRI patella images, use volume image rendering technology to draw a visualized three-dimensional model of the patella, such as figure 2 As shown, the color and shape of the constructed 3D model should be as consistent as possible with the target object.
[0072] S2: Establish the world coordinate system w, the object coordinate system o and the camera coordinate system c, preset the positions of the 3D model and the camera in the world coordinate system w, and establish the world coordinate system w, the object coordinate system o, and the camera coordinate system The coordinate system t...
Embodiment 2
[0082] Embodiments of the present invention provide a method for automatic positioning and attitude determination of a three-dimensional target based on monocular optical photography, using a fourth-order Rubik's Cube as the target object to simulate the navigation process in the industrial field (the navigation process in aerospace and other fields is similar to this), The flow chart of this method is as figure 1 As shown, it includes the following steps:
[0083] S1: Construct a visual 3D model of the fourth-order Rubik's Cube. The color and shape of the 3D model should be as consistent as possible with the target object.
[0084] S2: Establish the world coordinate system w, the object coordinate system o and the camera coordinate system c, preset the positions of the 3D model and the camera in the world coordinate system w, and establish the world coordinate system w, the object coordinate system o, and the camera coordinate system The coordinate system transformation rela...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com