


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Dynamic target rapid sensing method and system based on deep learning
A technology of dynamic target and deep learning, which is applied in neural learning methods, instruments, biological neural network models, etc., can solve problems such as equipment damage accidents, failure to calculate dynamic targets, and reduction of equipment distance, etc., to achieve fast and accurate recognition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
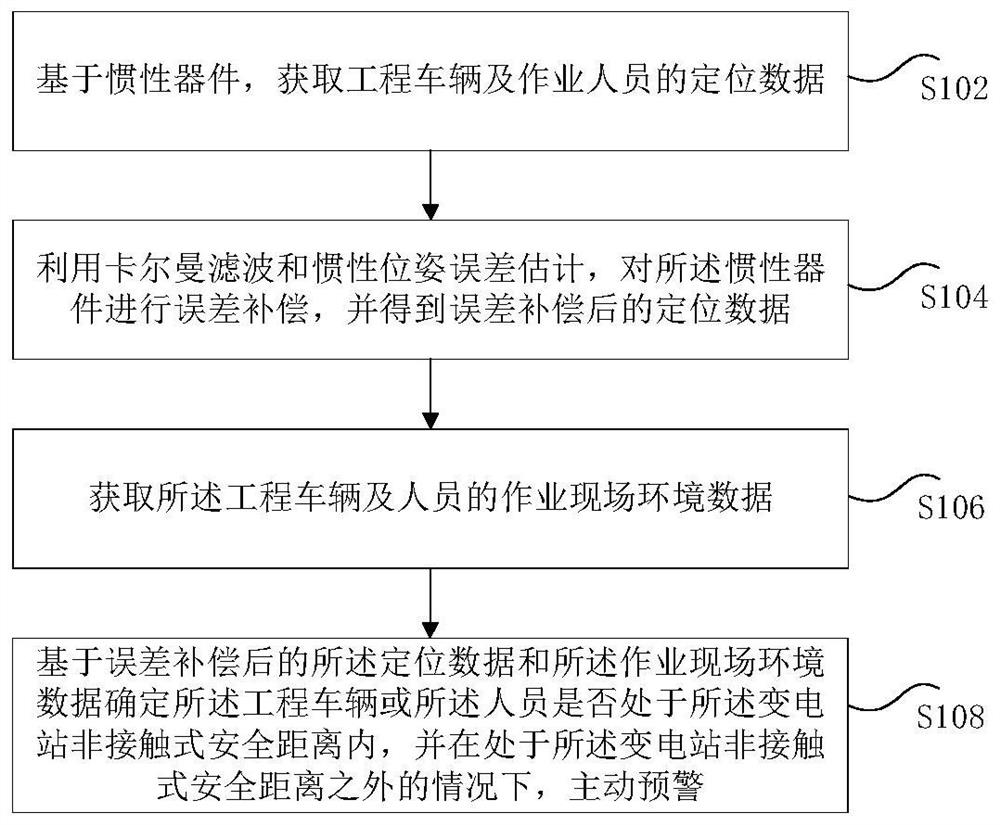
[0035] According to an embodiment of the present invention, a non-contact safety distance active warning method is provided, such as figure 1 As shown, the method includes:
[0036] Step S102, based on the inertial device, the positioning data of the engineering vehicle and the operator are acquired.
[0037] Based on inertial devices, such as inertial sensors, the pose information of the engineering vehicle and the operator on the construction site is obtained, and a pose motion constraint model is established by analyzing the motion characteristics of the engineering vehicle and the operator; using the most The optimal estimation method is to estimate the pose error of the operator and the engineering vehicle subject to motion constraints; and obtain the pose information of the operator and the engineering vehicle by using a weak strapdown navigation failure error model.
[0038] After that, use multi-frequency point channel estimation to obtain different frequency point si...
Embodiment 2
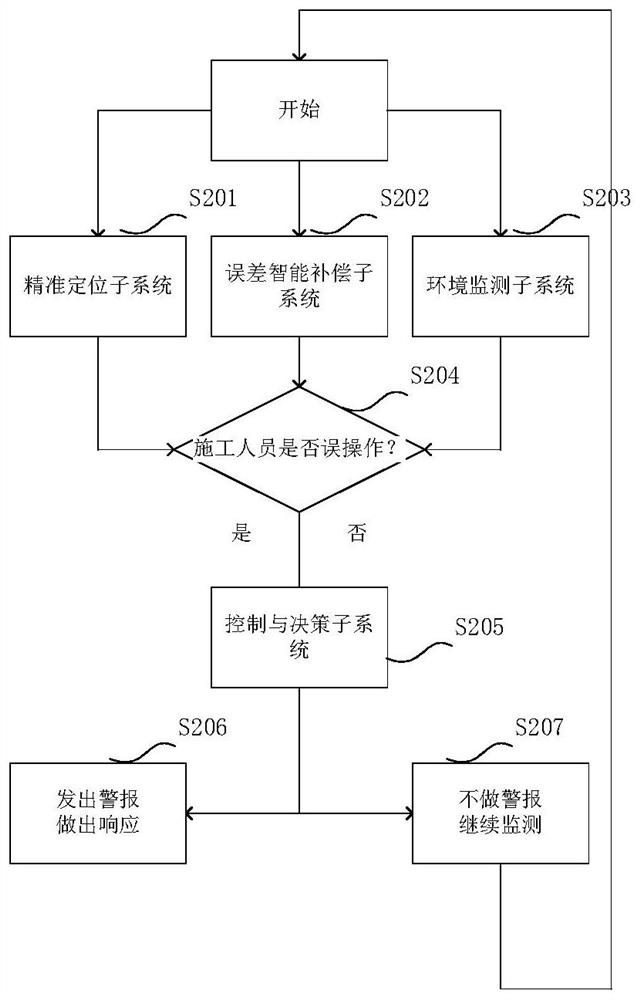
[0050] According to an embodiment of the present invention, a non-contact safety distance active warning method is provided. This method can be applied in the following scenarios: the project application environment includes 5 conditions including 500 kV AC site, 220 kV AC site, 35 kV AC site, 500 kV soft DC commutation site, and large deep foundation pit operation scene. like figure 2 As shown, the method includes the following steps:
[0051] Step S201, calling the precise positioning subsystem.
[0052] The precise positioning subsystem focuses on inertial autonomous positioning and orientation, supplemented by satellite navigation and positioning enhancement technology, and establishes a multi-source fusion autonomous precise positioning system based on signal strength, environmental conditions, movement forms and other factors.
[0053] Step S202, calling the error intelligent compensation subsystem.
[0054] The error intelligent compensation subsystem performs cycle...
Embodiment 3
[0069] According to an embodiment of the present invention, a non-contact safety distance active warning method is provided. The steps in this embodiment are similar to those in Embodiments 1 and 2, the difference lies in the method executed by the precise positioning subsystem.
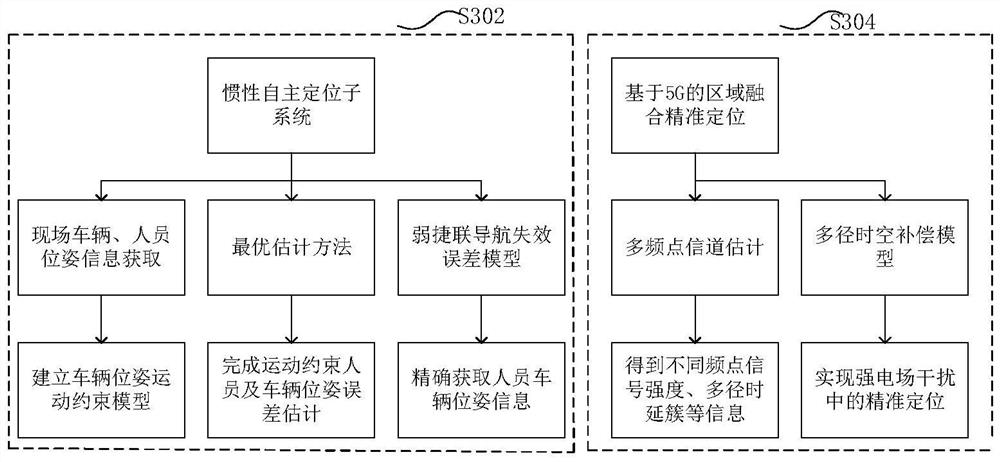
[0070] The precise positioning subsystem includes an inertial autonomous positioning module and an elastic fusion precise positioning technology module. The workflow of the precise positioning subsystem is as follows: image 3 As shown, the following steps S302 to S304 are included.
[0071] Step S302, acquiring pose information based on the inertial device.
[0072] The inertial autonomous positioning module of the precise positioning subsystem solves the problem of obtaining the pose information of engineering vehicles and operators on the construction site, and establishes a vehicle pose and motion constraint model by analyzing the motion characteristics of personnel and engineering vehicles. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com