INS-assisted GNSS PPP precise dynamic navigation positioning method and system
A navigation positioning and dynamic technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., can solve the problem of difficulty in re-fixing PPP ambiguity, achieve simple and convenient implementation, improve user experience, and solve practical applications. inconvenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
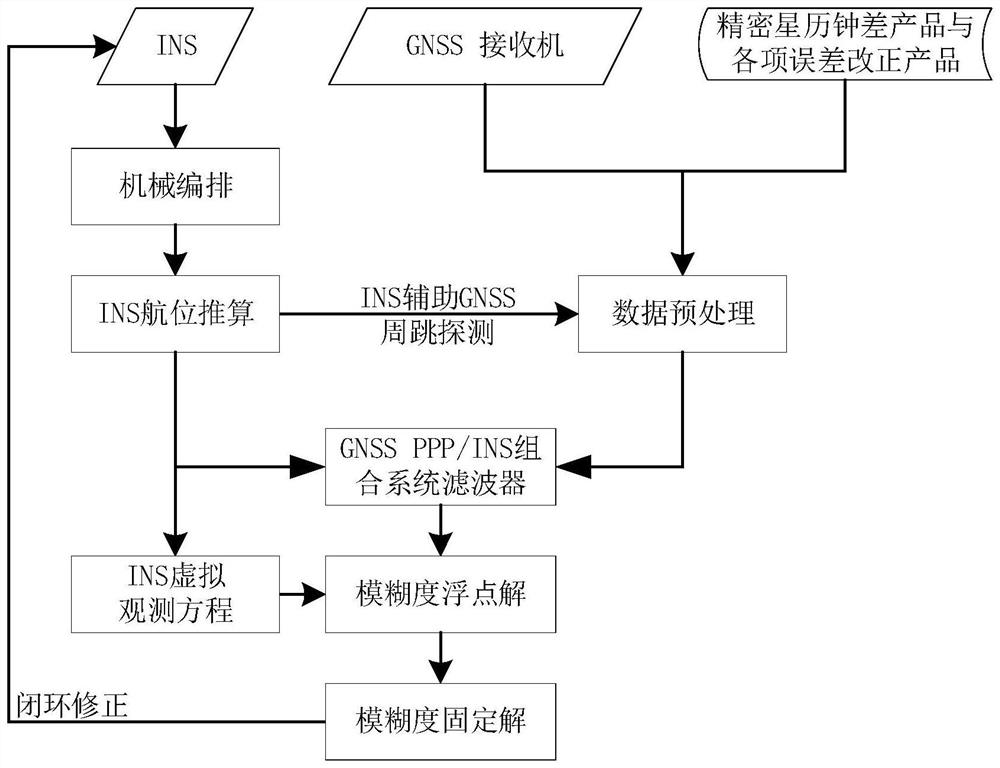
[0052] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
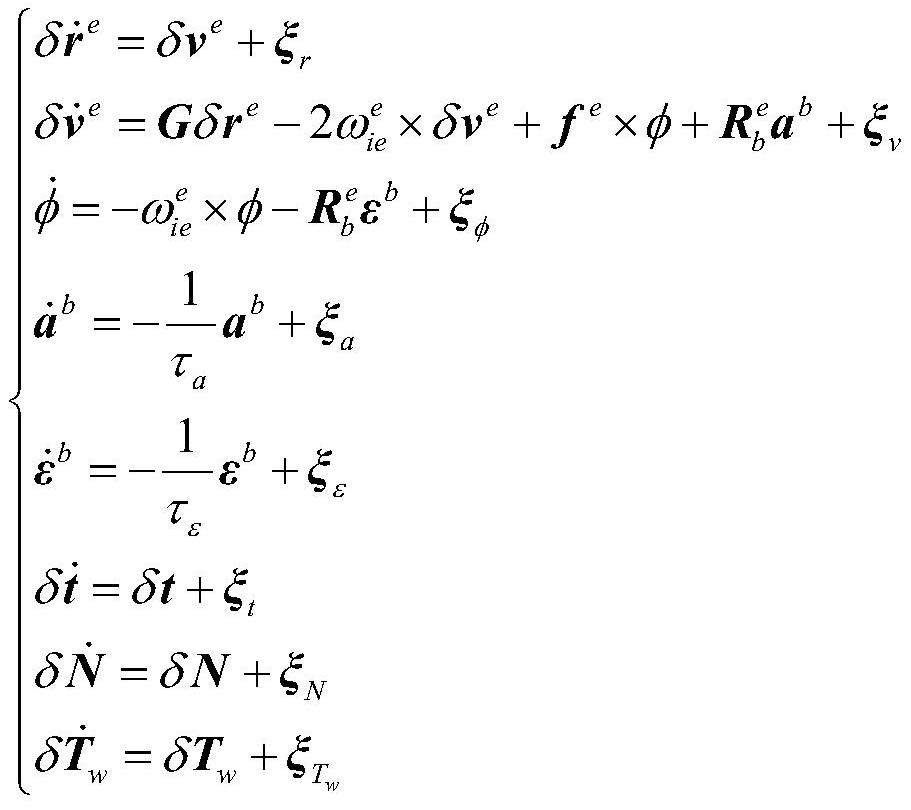
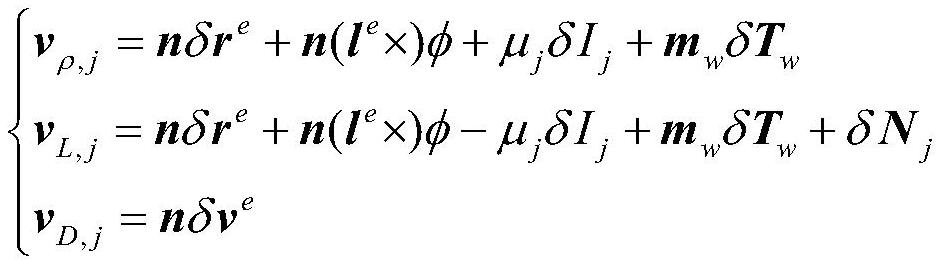
[0053] The present invention is different from the traditional combined filtering model. The INS position parameter is used as a virtual observation value, and the GNSS PPP ambiguity is solved by the method of adding INS coordinate constraints. The INS error is related to the error of inertial components, the motion state of the carrier, and environmental factors, etc., and the establishment of its stochastic model is relatively difficult. Therefore, the INS position error expression is deduced from the three single-channel INS error equations of east, north, and sky respectively, based on This builds a stochastic model of the INS virtual observations. This function model and stochastic model can adjust the weights of each system in real time according to factors such as observation residuals, INS device levels, and INS calib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com