Multi-granularity calculation method for hybrid scene airborne laser point cloud classification
An airborne laser and computing method technology, applied in computing, computer components, instruments, etc., to achieve the effects of suppressing misclassification, saving costs, and improving recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0048] The present invention is described in further detail now in conjunction with accompanying drawing.
[0049] Such as figure 1 Shown, the inventive method mainly comprises the following steps:
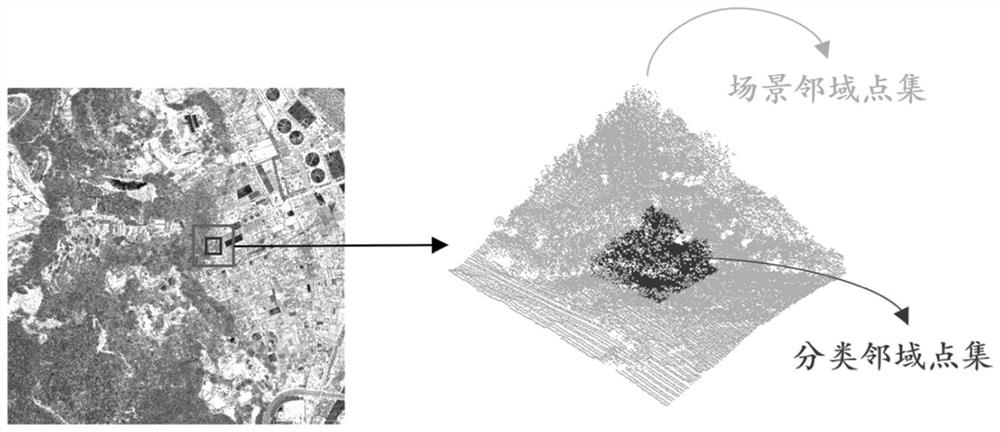
[0050] Step 1: Randomly select a sampling point in the entire point cloud, and search for a set of square scene neighborhood point sets with a side length of 150 meters and a set of square classification neighbors with a side length of 50 meters around the sampling point. set of domain points, such as figure 2 shown.
[0051] Step 2: In the way of unsupervised learning, train the point cloud global feature extraction model, and extract the spatial context information (scene knowledge) from a large range of scene neighborhood points to achieve coarse-grained large-scale scene perception. Such as image 3 shown, including the following sub-steps:
[0052] (1) Collect a large number of square point cloud blocks with a side length of 150 meters containing different scene categor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com