Intelligent automobile following decision and control method based on cognitive risk balance
A technology of intelligent vehicle and control method, applied in the field of intelligent vehicle following decision and control based on cognitive risk balance, can solve the problems of poor mobility, unclear physical meaning, and insufficient anthropomorphic degree of the following model, and achieves a high level of improvement. The effect of breadth, risk reduction, and safety improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The intelligent car follow-up decision and control method based on cognitive risk balance according to the embodiments of the present application will be described below with reference to the accompanying drawings.
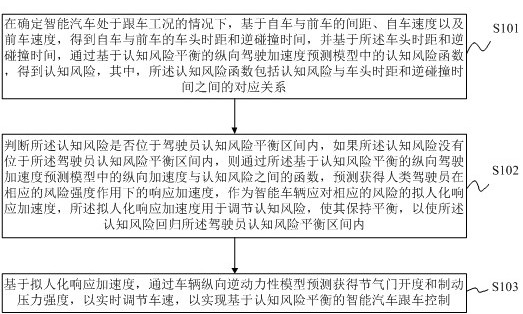
[0051] in particular, figure 1 It is a schematic flowchart of a smart car following decision-making and control method based on cognitive risk balance provided in the embodiment of the present application.
[0052] Such as figure 1 As shown, the smart car follow-up decision-making and control method based on cognitive risk balance includes the following steps:
[0053] In step S101, when it is determined that the smart car is in the vehicle-following condition, based on the distance between the vehicle and the vehicle in front, the speed of the vehicle and the speed of the vehicle in front, the time headway and the reverse collision time between the vehicle in front and the vehicle in front are obtained, And based on the headway and reverse collision ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com