Substation inspection system and inspection method thereof
An inspection system and substation technology, applied in the field of substation inspection, can solve the problems of not being able to meet the real-time detection and maintenance requirements of robot navigation, not considering the real-time environment of the substation environment, and failing to meet the inspection requirements, so as to improve efficiency and real-time performance, improve real-time performance, and reduce the effect of network bandwidth limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
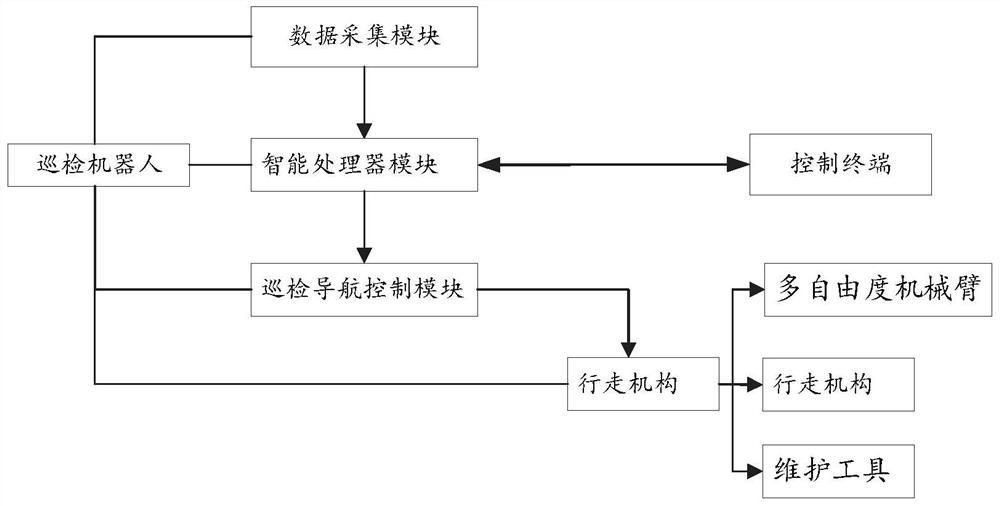
[0036] Such as figure 1 As shown, this embodiment discloses a substation inspection system, an inspection robot and a control terminal; the inspection robot includes a data acquisition module, an intelligent processor module, and an inspection navigation control module;
[0037] The data acquisition module includes an optical camera and a three-dimensional laser radar, and the intelligent processor is used to receive the image data collected by the optical camera and the three-dimensional laser radar, construct a three-dimensional semantic map of the substation and its semantic information, and generate Inspection task path;
[0038] The inspection navigation control module is used to control the inspection robot to inspect the equipment to be inspected according to the inspection task path, and the intelligent processor module judges whether the equipment to be inspected is faulty according to the returned inspection image of the equipment to be inspected, and if so, sends T...
Embodiment 2
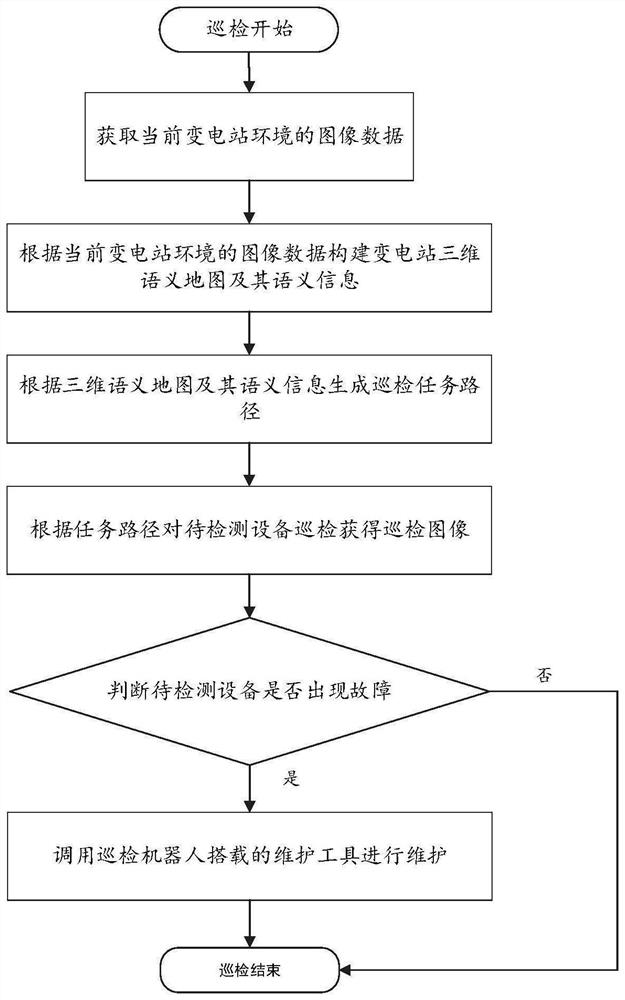
[0066] Such as image 3 As shown, this embodiment provides a substation inspection method, the method includes the following steps:
[0067] Obtain the image data of the current substation environment;
[0068] Construct a three-dimensional semantic map of the substation and its semantic information based on the image data of the current substation environment, and generate inspection task paths based on the three-dimensional semantic map and its semantic information;
[0069] According to the task path to inspect the equipment to be inspected, judge whether the equipment to be inspected is faulty according to the inspection image of the inspected equipment, if so, output the fault type, call the maintenance strategy according to the fault type, and call the maintenance tool carried by the inspection robot according to the maintenance strategy maintain.
[0070] The method described in the above second embodiment is proposed based on the system in the first embodiment. For t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com