Parallel arm intelligent silkworm cocoon sorting robot and silkworm cocoon sorting method
A parallel arm and robot technology, applied in the field of agricultural robots and intelligent equipment of sericulture facilities, can solve the problems of restricting the healthy development of the modern sericulture industry, shortage of rural labor, and high labor costs, and achieve reasonable design, automatic sorting, and labor intensity reduction. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to clearly illustrate the technical features of the solution, the solution will be described below through specific implementation modes.
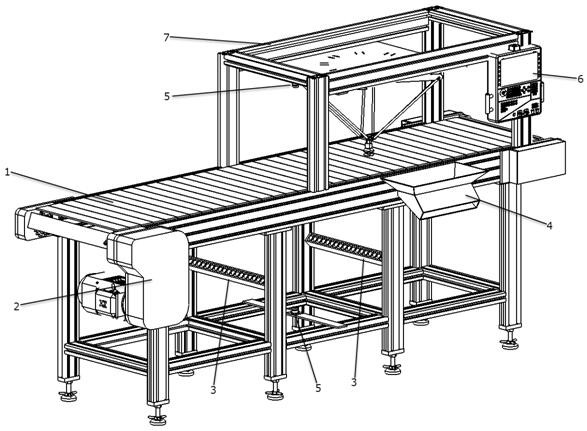
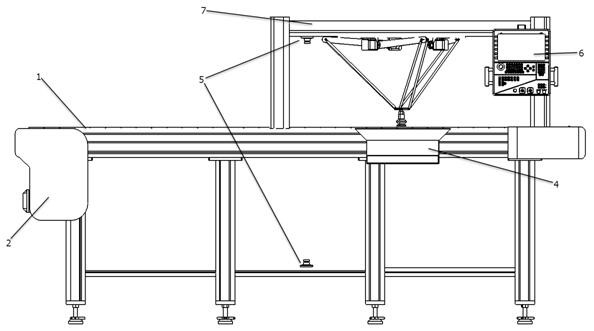
[0026] Such as figure 1 A parallel arm intelligent cocoon sorting robot is shown, including a frame 7, and a main control system 6 installed on the frame, an image acquisition device, a cocoon conveying system and a parallel arm sorting manipulator. The frame adopts an aluminum alloy frame, Used to carry other systems of the robot. The collection end of the image acquisition device faces the cocoons transported by the cocoon conveying system, the parallel arm sorting manipulator is located in front of the image acquisition device, and the execution end of the parallel arm sorting manipulator is located above the cocoon conveying system, the image acquisition device and the parallel arm sorting manipulator Both are electrically connected with the control system.
[0027] The silkworm cocoon conveying system includes severa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com