Method for realizing hybrid dimension joint simulation by utilizing dynamic parameter mixing
A technology of co-simulation and dynamic parameters, applied in the field of simulation, to solve problems such as unresolved differences in commercial software
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
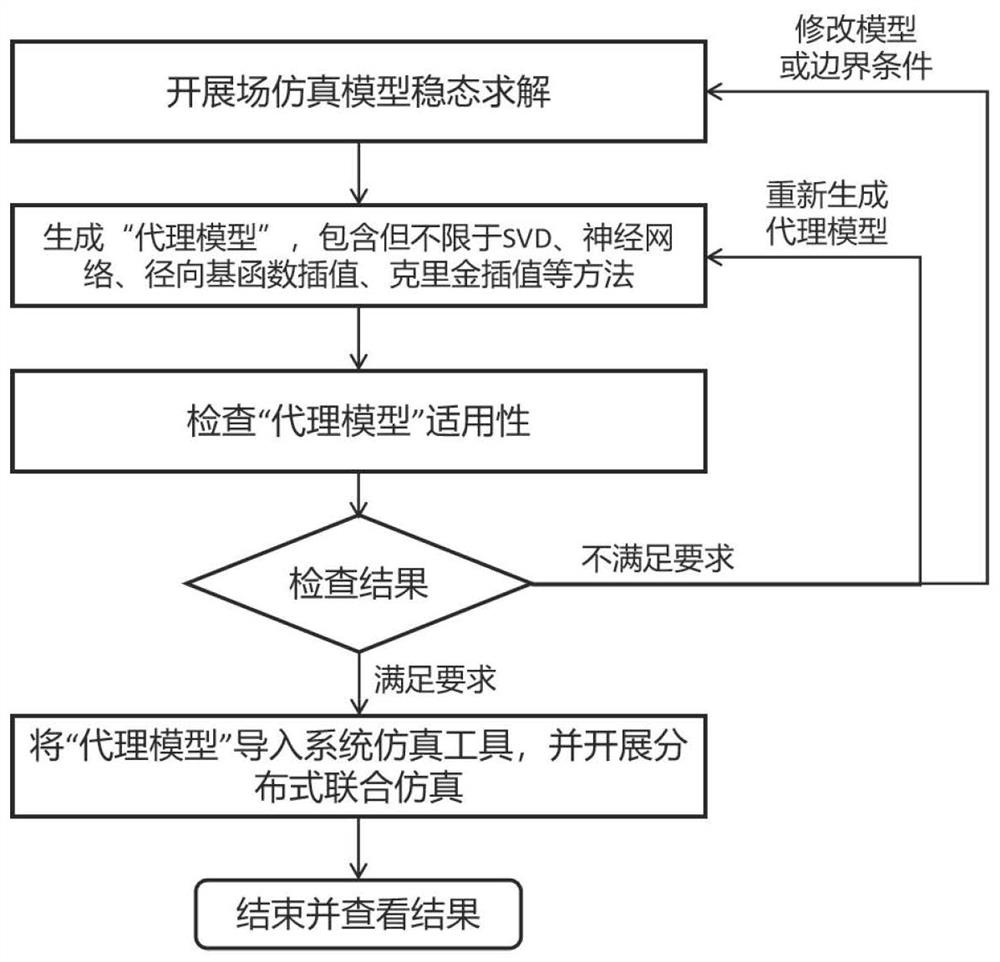
Method used
Image

Examples
Embodiment 1
[0057] Embodiment 1 Co-simulation of actuator stress field
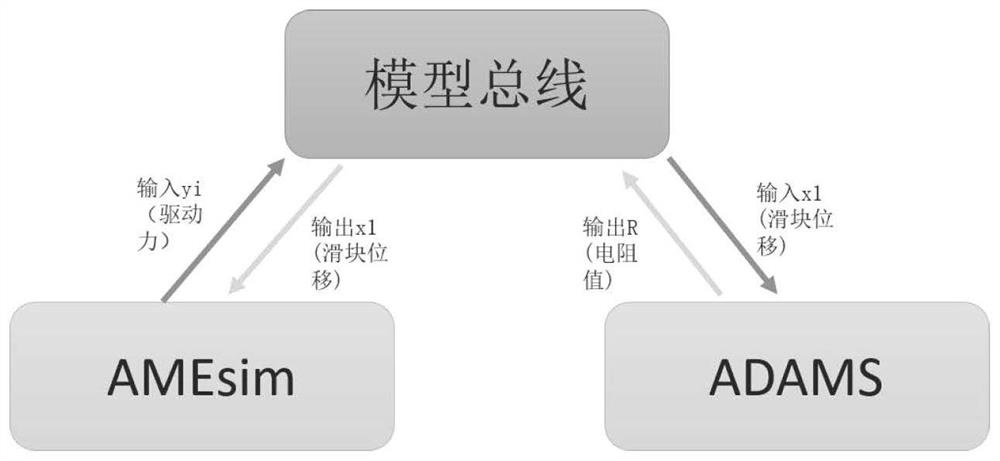
[0058] The stress field analysis of the actuator adopts the co-simulation of AMESim and ADAMS, and is described through the crank slider mechanism. The crank-slider mechanism refers to a planar linkage mechanism that uses a crank and a slider to achieve mutual conversion between rotation and movement; the component that forms a moving pair with the frame in the crank-slider mechanism is a slider, and the crank and slider are connected through a rotating pair. The components are connecting rods. The mechanism model of the slider-crank mechanism is established in ADAMS, the force model is established in AMESim, and a sinusoidal force is applied to the crank of the slider-crank mechanism to realize the movement of the slider following the change of the force within a limited displacement and make the connecting rod flexible Investigate the stress and deformation value of the connecting rod.
[0059] The cross-linking ...
Embodiment 2
[0066] Embodiment 2 Co-simulation of electromagnetic field and control circuit
[0067] The 28V low-voltage DC power generation system is an integrated system integrating control, circuit and generator body. The analysis of this type of generator requires not only the calculation of its transient magnetic field, but also the consideration of the control circuit. The 28V DC generator circuit model is established on the platform of ANSYS\TwinBuilder, and the 2D magnetic field model is established in Maxwell to conduct electromagnetic field simulation analysis on the generator. The model consists of four parts, and the interaction relationship between each part is as follows: Figure 8 shown.
[0068] The motor model is a permanent magnet synchronous generator, and the model is a 2D electromagnetic field finite element model of maxwell. The control circuit is built with Twin Builder, and the control mode is a typical DC-DC buck circuit; the control principle is: the output AC ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com