Wearable fracture reduction and rehabilitation robot control system and method
A rehabilitation robot and control system technology, applied in the general control system, control/adjustment system, surgical robot, etc., can solve the problems of high control cost, high cost, poor reliability, etc., achieve strong anti-electromagnetic interference ability, prevent secondary Damage, the effect of meeting miniaturization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] Firstly, the application of the embodiment of the present invention is described. This control system is used for the control of wearable fracture surgery and rehabilitation robots. The pose control and force control of the robot are mainly realized by adjusting the rod length of the branch chain of the robot. The present invention will be described in further detail below in conjunction with the accompanying drawings. The description is exemplary and is only used to explain the present invention, but not to be construed as a limitation of the present invention.
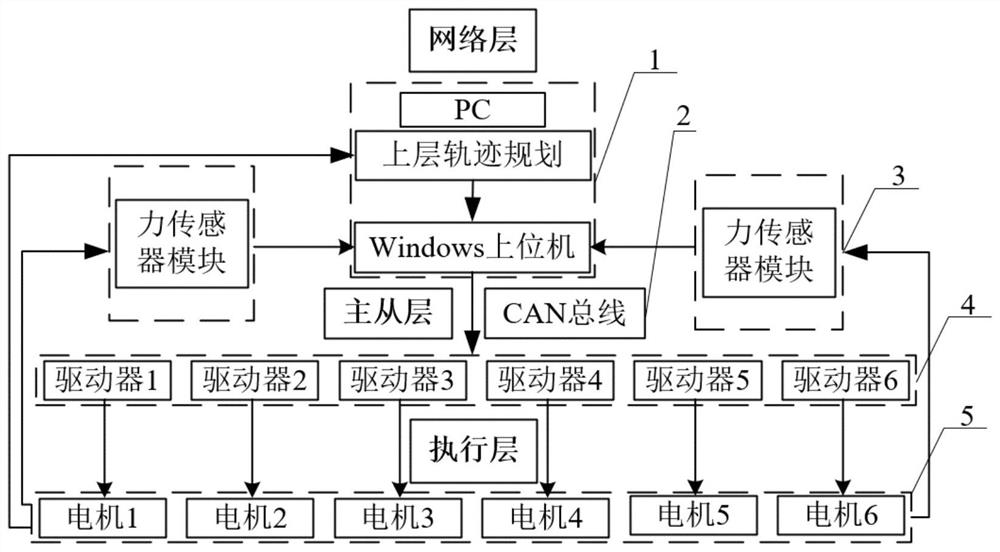
[0048] as attached figure 1 As shown, the structure of the wearable fracture reduction and rehabilitation robot control system of the present invention mainly includes three aspects: a network layer, a master-slave layer, and an execution layer.
[0049] The network layer refers to the host computer software 1 used for human-computer interaction information. The master-slave layer is composed of a communicati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com