Module data interaction method of robot, electronic equipment and storage medium
A technology of modular data and interactive methods, applied in the direction of electrical digital data processing, instruments, program control design, etc., can solve the problems of wasting time, unable to avoid communication processes, etc., and achieve the effects of increasing efficiency, facilitating unified processing, and ensuring reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions in the embodiments of the present application will be described below with reference to the drawings in the embodiments of the present application.
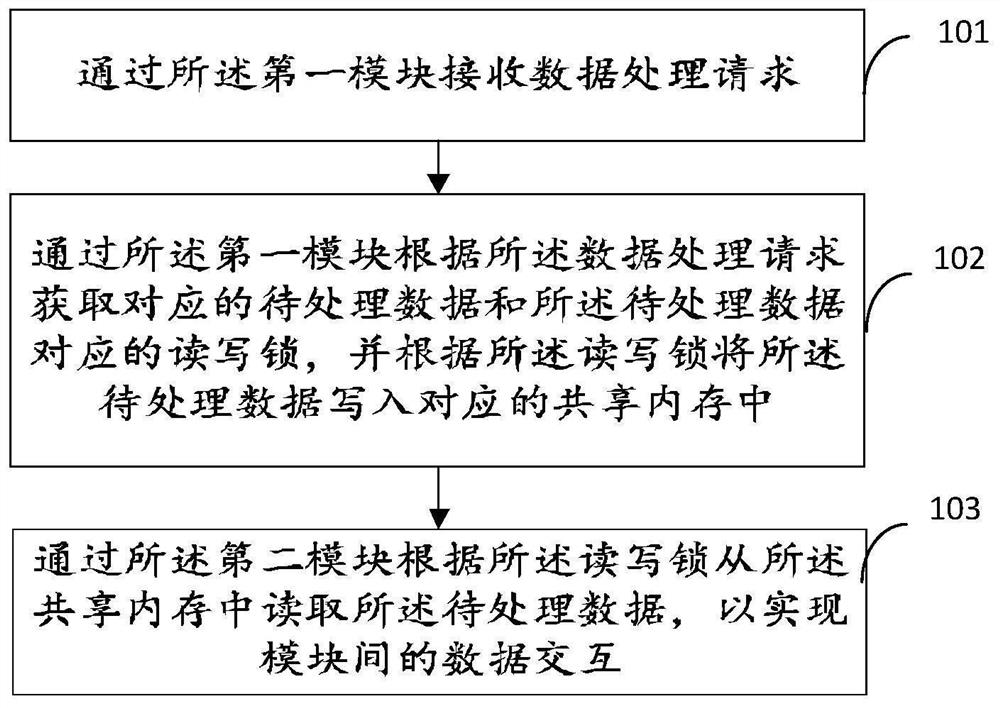
[0032] figure 1 It is a schematic flowchart of a robot module data interaction method provided in the embodiment of this application, as shown in figure 1 As shown, this method can be applied to the module data interaction in various types of robots. A robot is a machine that can perform many tasks or moves through programming and automatic control. It can assist or even replace humans to complete dangerous, heavy, and complex tasks. work, improve work efficiency and quality, and expand or extend the range of human activities and capabilities; robots can be various industrial robots, service and humanoid robots. The robot is divided into multiple modules according to their functions. During the data interaction process, the module data interaction in the embodiment of the present application can be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com