Multi-line laser radar based on multiple lasers and detection method using multi-line laser radar
A multi-line laser and laser technology, used in radio wave measurement systems, instruments, measurement devices, etc., can solve problems such as inability to take into account high-level angular resolution and high scanning frequency, low reliability and stability, and waste of laser beams. , to facilitate communication, reduce the number and space occupied, and save costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027] A multi-line laser radar based on multiple lasers according to an embodiment of the present invention, the multi-line laser radar includes:
[0028] A rotor and a stator, the interior of the rotor is isolated as a firing cavity and a receiving cavity; the rotor and the stator are prior art in the art, and will not be repeated here;
[0029] figure 1 Schematically shows the structural diagram of the carrier and the laser in the embodiment of the present invention, as shown in figure 1 shown;
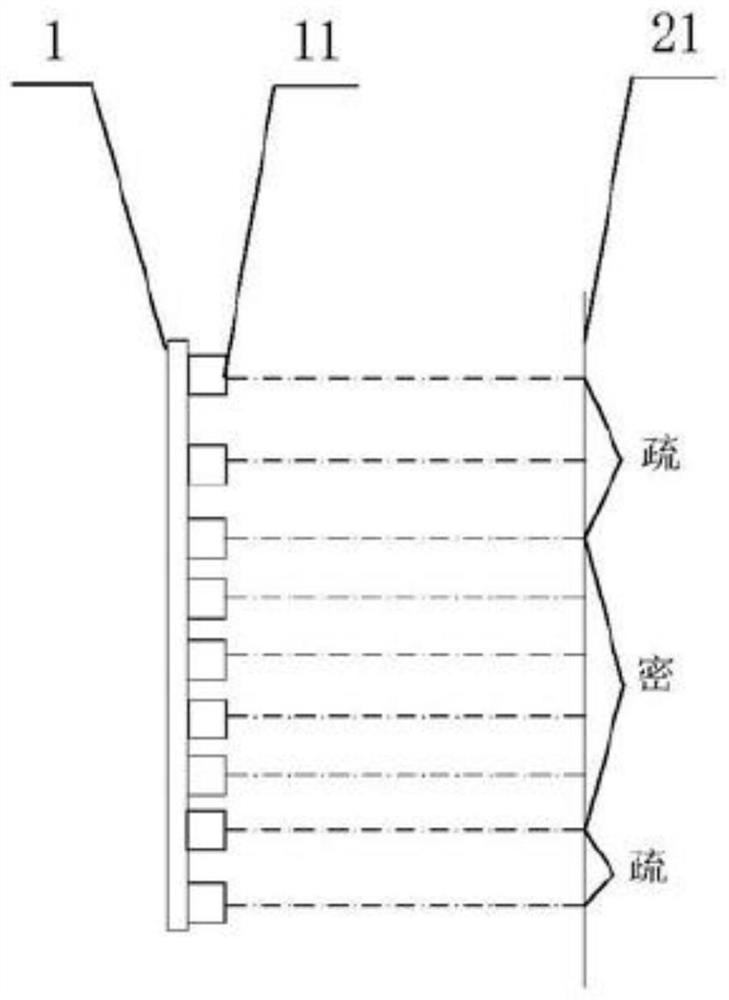
[0030] There is only one carrier 1 for carrying multiple lasers; the carrier is arranged in the emitting cavity;
[0031] A plurality of lasers 11, such as 20, 40, the specific number corresponds to the number of lines of the laser radar; the lasers are fixed on the carrier from top to bottom, and are collinear;
[0032] A light collimating device, such as a collimating lens, the projection point of the laser on the carrier on the vertical plane 21 including the main axis of the...
Embodiment 2
[0040] A multi-line laser radar based on multiple lasers in the embodiment of the present invention is different from Embodiment 1 in that:
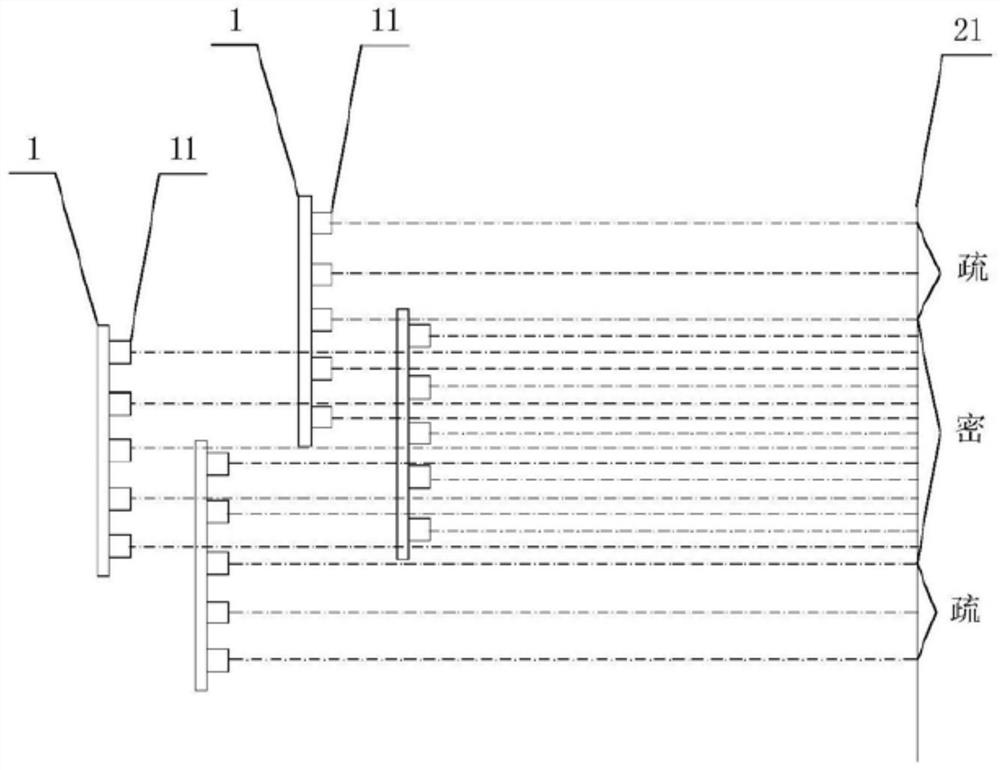
[0041] The plurality of lasers are not all collinear, such as most of the lasers are vertically arranged and collinear, with equal spacing, and a small number of lasers are vertically arranged and collinear, with equal intervals; the majority of the lasers and the small number of lasers are staggered in the horizontal direction, The projection points of the small part of the lasers on the vertical plane including the main axis of the optical collimation device are between the projection points of the majority of the lasers on the vertical plane, so that the projection points have a dense distribution, which improves the The beam density of the laser output beam in the horizontal direction and nearby, correspondingly improves the vertical angular resolution.
Embodiment 3
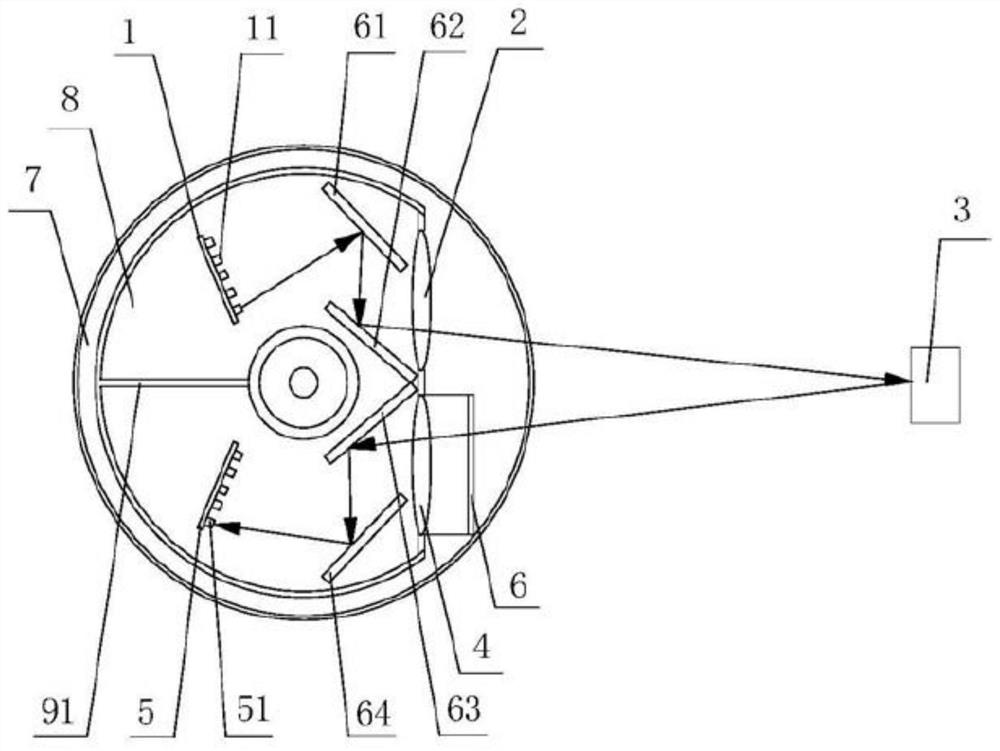
[0043] figure 2 A simplified structural diagram of a multi-line laser radar based on multiple lasers according to an embodiment of the present invention is schematically given, as shown in figure 2 As shown, the multi-line laser radar includes:
[0044] Rotor, stator, described rotor comprises inner cavity 8 and outer cavity 7, and the inside of described inner cavity 8 is isolated as launch cavity and receiving cavity, as isolating by dividing plate 91; Described rotor and stator are existing in the art Technology, no more details here;
[0045] The launch cavity is set:
[0046] image 3 A schematic diagram of the structure of the laser and the carrier of the embodiment of the present invention is given schematically, such as image 3 shown;
[0047] A plurality of carriers 1, such as 5, each carrier is vertically fixed in the emission cavity for carrying multiple lasers; a plurality of carriers 1 are distributed at intervals in the horizontal direction;
[0048] A p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com