GNSS-based satellite celestial navigation system error autonomous calibration method and system
A technology of celestial navigation and system error, which is applied in the field of satellite autonomous navigation research, can solve the problems of large system error of celestial navigation system and the reliability of GNSS on-orbit intermittent navigation, etc., so as to improve the ability of autonomous operation, improve autonomy, and the method is correct and reliable Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
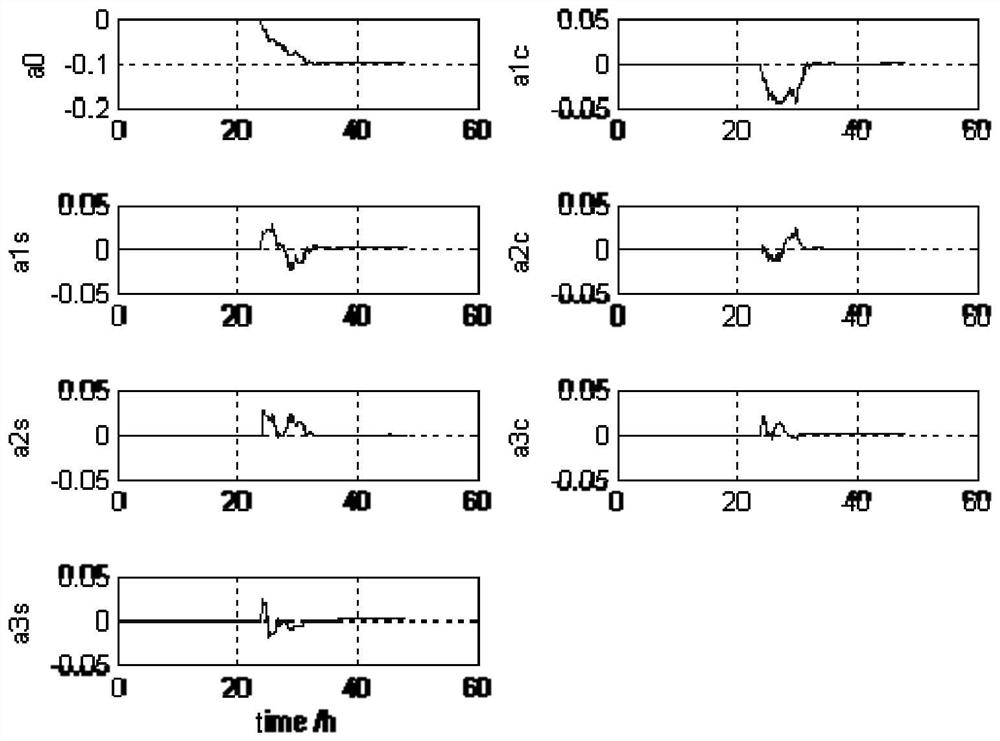
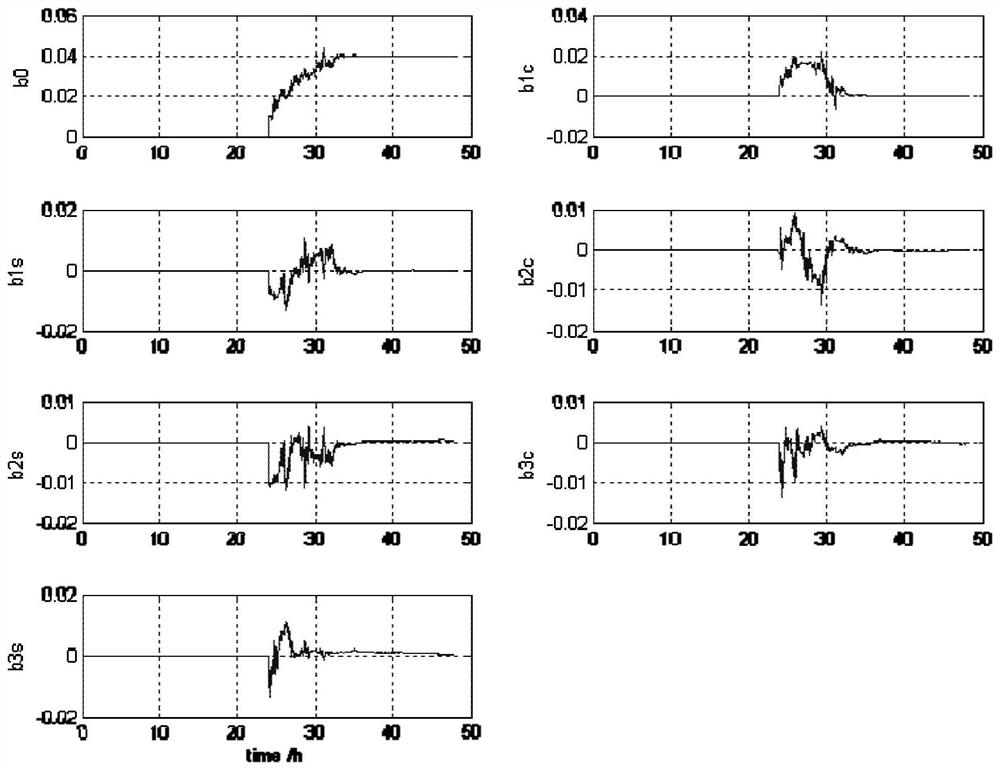
[0084] Consider that the earth sensor has a constant systematic error, such as Δθ es =-0.04°, and also has a random error of 0.02° (3σ), and at the same time, without considering the measurement error of the star sensor and GNSS, the estimated result is as follows figure 2 and image 3 As shown, the error self-calibration starts from the 24th hour, and the calibration convergence time is about 8 hours. The variables starting with a and b in the figure are respectively related to the error parameter vector in the calibration method One-to-one correspondence with the internal variables of pθ, the results show that the errors a0 and b0 of the constant value items converge to -0.1° and 0.04° respectively, which is opposite to the polarity of the set value, which is consistent with the information calculation θ ge -θ es Correlation; other parameters converge to 0.
Embodiment 2
[0086] Considering that the star sensor has a constant system error, the attitude error of the star body coordinate system relative to the inertial system is projected onto the Z axis of the body coordinate system, which is also reflected in the roll and pitch errors, and the third-order Fu The Liye basis function is used as the expression form, and the corresponding error parameters are as follows:
[0087] Px=[0.1° 0.05° 0.04° 0.03° 0.02° 0.01° 0.01°];
[0088] Py=[-0.04° -0.05° -0.04° -0.03° -0.02° -0.01° -0.01°];
[0089] At the same time, without considering the measurement errors of the earth sensor and GNSS, the estimated results are as follows Figure 4 and Figure 5 As shown, the error self-calibration starts from the 24th hour, and all the calibration results are consistent with the setting results.
[0090] Under the conditions of Example 2, two results of the celestial navigation method without error parameter compensation and with error parameter compensation w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com