Cluster four-rotor unmanned aerial vehicle path generation method based on task logic scheduling
A quad-rotor UAV, path generation technology, applied in control/regulation systems, vehicle position/route/altitude control, non-electric variable control, etc., can solve problems such as no task allocation, no multi-task logic scheduling, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
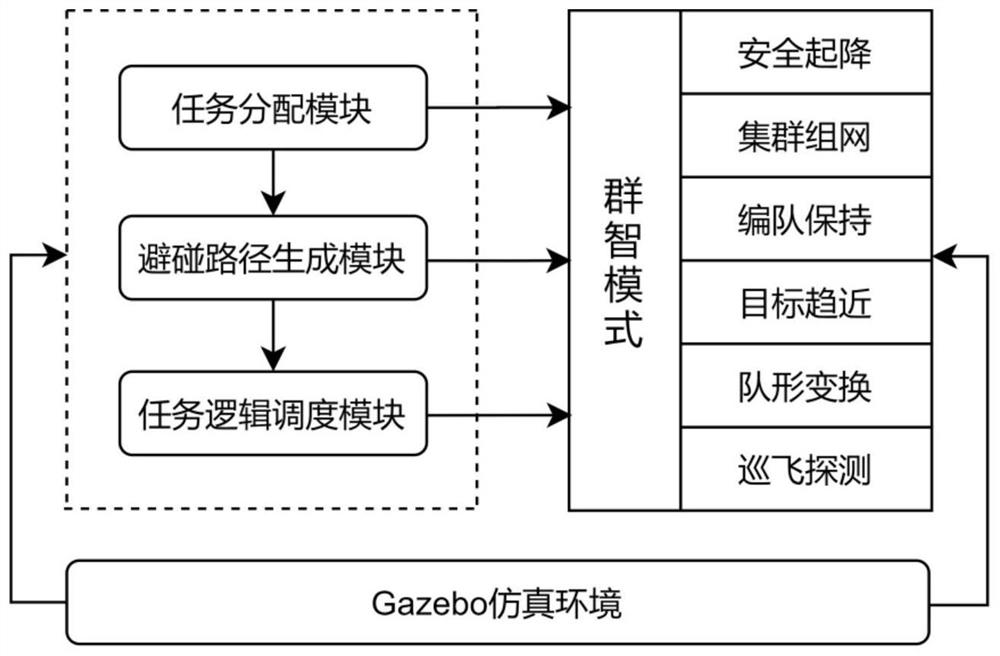
[0067] The present invention is proposed based on the cluster Quadrotor UAV collision avoidance task scheduling logic path generation method, and a portion mainly by environmental simulation algorithm part composition.
[0068] Simulation environment set up by the Gazebo. Gazebo is a powerful 3D simulation software, have good physical simulation performance, its main features include: (1) real dynamics simulation: support a variety of high-performance physics engine, such as DART, ODE, SimBody, Bullet, etc. ; (2) realistic three-dimensional visualization: Gazebo using OGRE (open graphics rendering engine), it is possible to achieve a good visual effect, such as light, shading and material. (3) sensor and plug: support multiple virtual sensor such as a laser range finder, a touch sensor, 2 / 3D camera or the like, through the API to support the user in the form of plug-in design and construction of autonomous sensors, environmental control, and the robot model.
[0069] The present...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com