An intelligent control method for the predetermined precision positioning of a flexible manipulator
A flexible manipulator and intelligent control technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve the problem of complex controller design, time-consuming, and difficulty in quickly tracking the desired trajectory and predetermined accuracy of the flexible manipulator Positioning and other issues, to achieve good robustness and reliability, reduce the effect of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
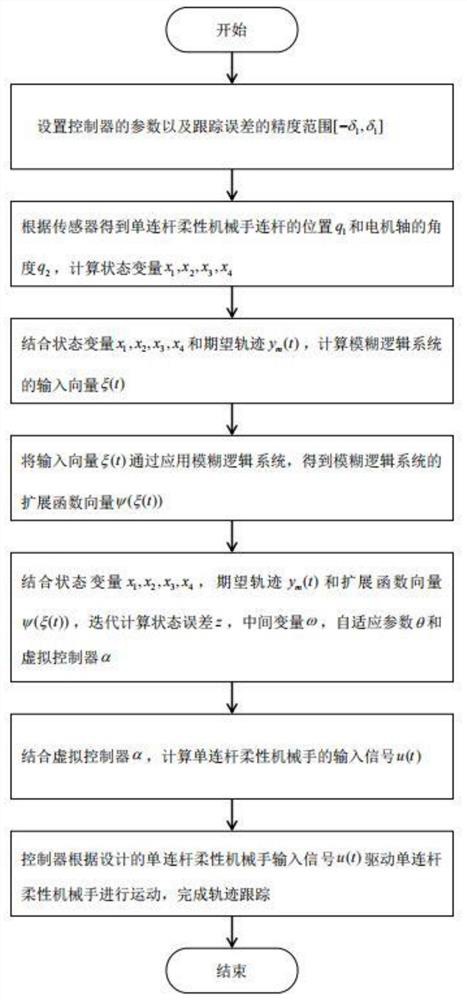
[0057] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention; obviously, the described embodiments are only a part of the embodiments of the present invention, not all of the embodiments. The embodiments of the present invention, and all other embodiments obtained by those of ordinary skill in the art without creative work, fall within the protection scope of the present invention.
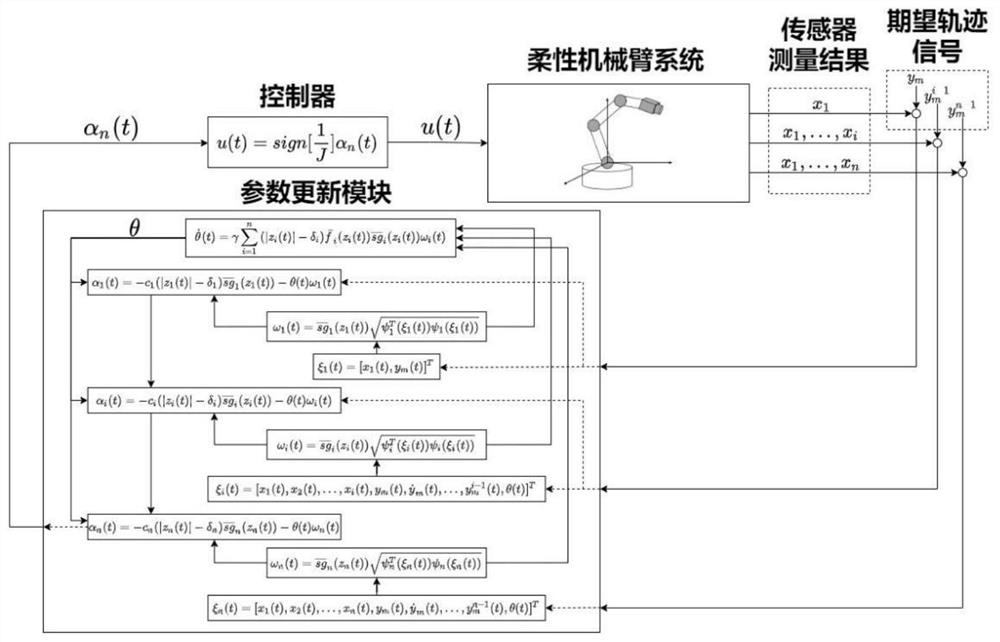
[0058] a) Models and symbols describing the flexible manipulator system. For the flexible manipulator, its dynamic model is described as follows
[0059]
[0060]
[0061] Among them, I and J are the moment of inertia of the connecting rod and the motor shaft, M is the mass of the connecting rod, g is the acceleration of gravity, l is the position of the center of gravity of the connecting rod and the stiffness coefficient k, these parameters ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com