A Preset Performance Control Method for Non-triangular Structured Systems Independent of Initial Conditions
A technology with initial conditions and preset performance, applied in the directions of adaptive control, comprehensive factory control, general control system, etc., it can solve the problems that the engineering system does not have and cannot accurately measure all the states of the system, algebraic loops, etc., to eliminate the initial The effect of conditional constraints, broadening practicality, reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
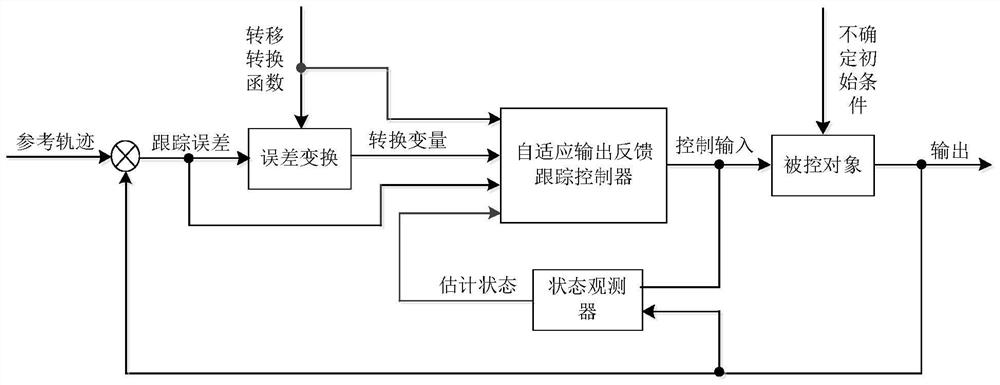
[0063] The invention discloses a preset performance control method for a non-triangular structure system that does not depend on initial conditions, and the specific steps are as follows:
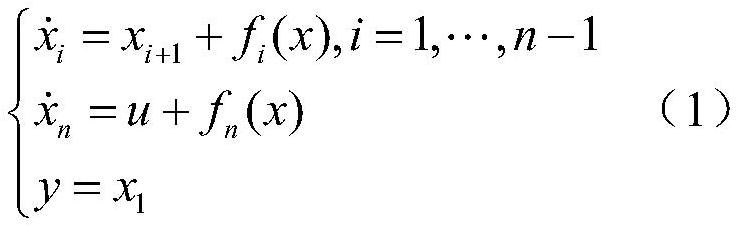
[0064] Step 1, establish the dynamic model of the non-triangular structure nonlinear system as follows;
[0065]
[0066] Among them, x=[x 1 ,...,x n ] T ∈ R n , u∈R and y∈R represent the state, input and output variables of the system respectively, f i (x)(i=1,...,n) represents an unknown smooth nonlinear function. Here we consider the case where only the output variables of the system are measurable.
[0067] Step 2. Aiming at the problem that some states of non-triangular nonlinear systems are unmeasurable, in order to ensure that the system achieves finite time tracking performance and reduce the complexity of subsequent controller design and stability analysis, a neural network and variable separation technology is used to construct A state observer with simple structure;
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com