Jet-propelled unmanned aerial vehicle and control method thereof
A control method and unmanned aerial vehicle technology, applied in aircraft control, flight direction control, control/adjustment system, etc., can solve problems such as high blade speed and hovering of unmanned aerial vehicle, so as to improve flexibility and robustness , increased universality and practicability, and the effect of avoiding the loss of control of the aircraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
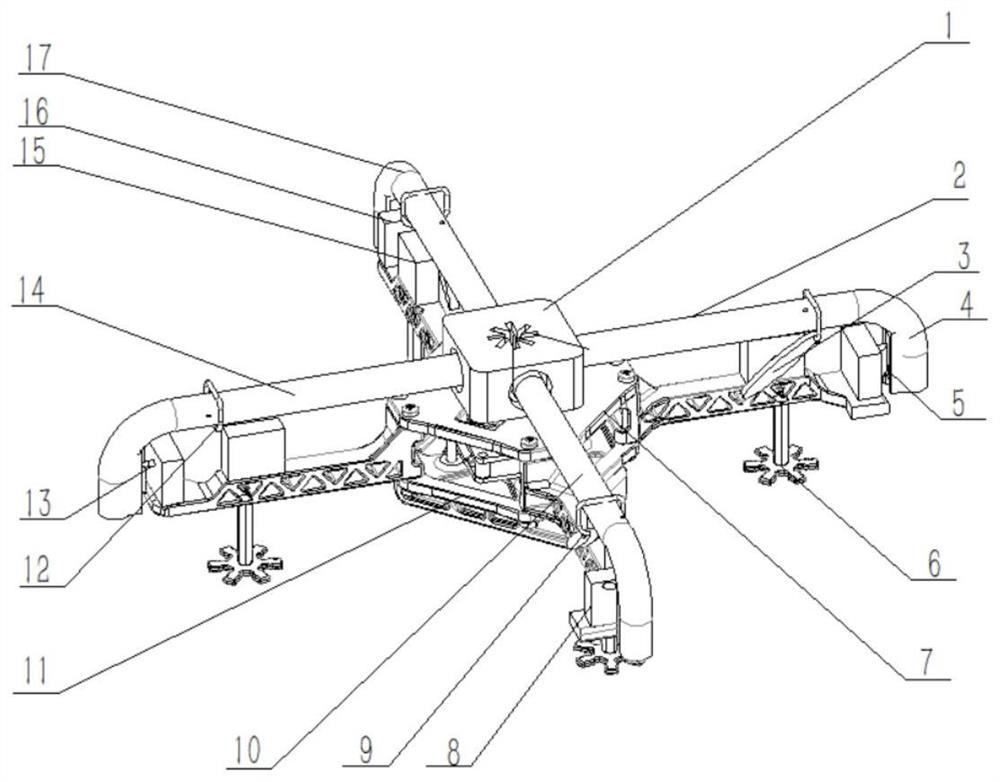
[0075] A jet unmanned aerial vehicle, comprising a fuselage and a rotatable machine arm arranged on the side of the fuselage, an aerodynamic module is arranged on the fuselage, and the aerodynamic module includes: an aerodynamic source 1 and a power arm unit, The fuselage is composed of upper and lower carbon fiber plates, the upper and lower carbon fiber plates are connected by studs in the middle, the upper end of the fuselage is connected with the air power source 1, and the lower end of the fuselage is connected with the onboard power supply; the arm is installed in the middle of the upper and lower rectangular carbon fiber plates of the fuselage , and fastened with the stud; the landing bracket is connected to the lower end of the arm;
[0076] The power arm unit includes:
[0077] Air jet suspension tube, which is arranged on the machine arm and connected to aerodynamic source 1 at one end,
[0078] Steering assembly, which is arranged on the arm and connected to the je...
Embodiment 2
[0104] A control method of a jet unmanned aerial vehicle in embodiment 1, the oblique hovering method of the unmanned aerial vehicle comprises:
[0105] Through the calculation of the flight controller, the real-time tilt state of the UAV is obtained, and then the desired tilt state is given,
[0106] Then combined with the desired tilt state and the real-time tilt state, it is controlled by the algorithm of the flight controller, and the angle of the rotation mechanism X and / or rotation mechanism Y corresponding to each jet suspension tube is changed; force offset;
[0107] At the same time, control the opening of the regulating valve corresponding to each jet suspension pipe to adjust the component force in the direction of gravity; make the drone hover;
[0108] Finally, the UAV reaches the desired tilt state.
[0109] Different jet suspension tubes are controlled by the flight controller, and the corresponding rotation mechanism X and / or rotation mechanism Y is rotated t...
Embodiment 3
[0134] The difference between this embodiment and Embodiment 1 is that it includes four machine arms and corresponding power arm units respectively. All the other are identical with embodiment 1.
[0135] The four power arm units are respectively: a first power arm unit, a second power arm unit, a third power arm unit and a fourth power arm unit.
[0136] Such as figure 1 As shown, the first power arm unit includes: a first jet suspension tube 2, a first rotating mechanism Y arranged at two-thirds of the corresponding machine arm, and a first rotating mechanism X arranged at one end of the corresponding machine arm;
[0137] The first rotating mechanism Y includes a first steering gear Y and a first driven mechanism 3 , and the first rotating mechanism X includes a first steering gear X and a fifth driven mechanism 5 . The structure of the rest of the second power arm unit, the third power arm unit and the fourth power arm unit is the same as that of the first power arm unit. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com