Multi-Motion Mode Wheel-leg Separated Quadruped Robot
A quadruped robot, multi-motion technology, applied in the field of robots, can solve the problems of poor carrying capacity and complex mechanical structure of robots, and achieve the effects of large carrying capacity, improved work adaptability, and easy processing and manufacturing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to further illustrate the technical solutions of the present invention, the following the present invention will be further described by way of examples.
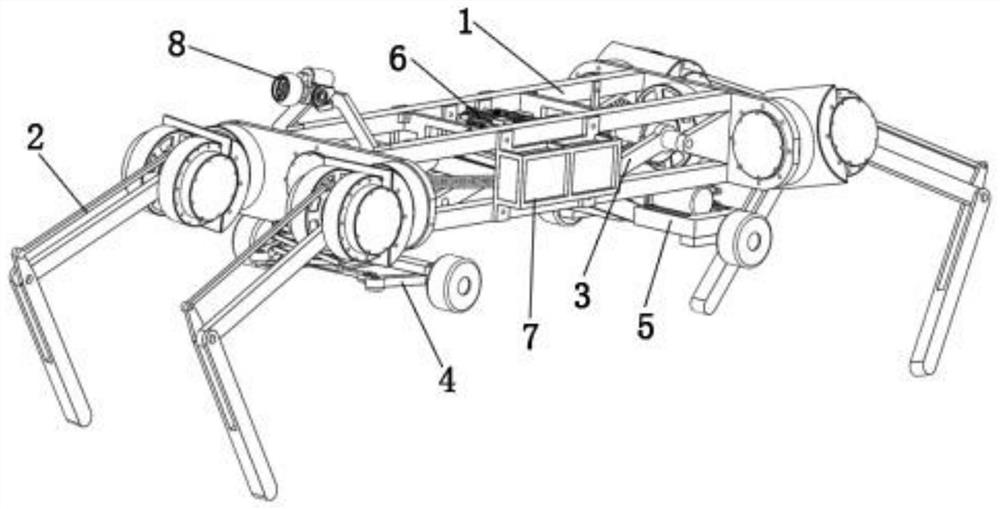
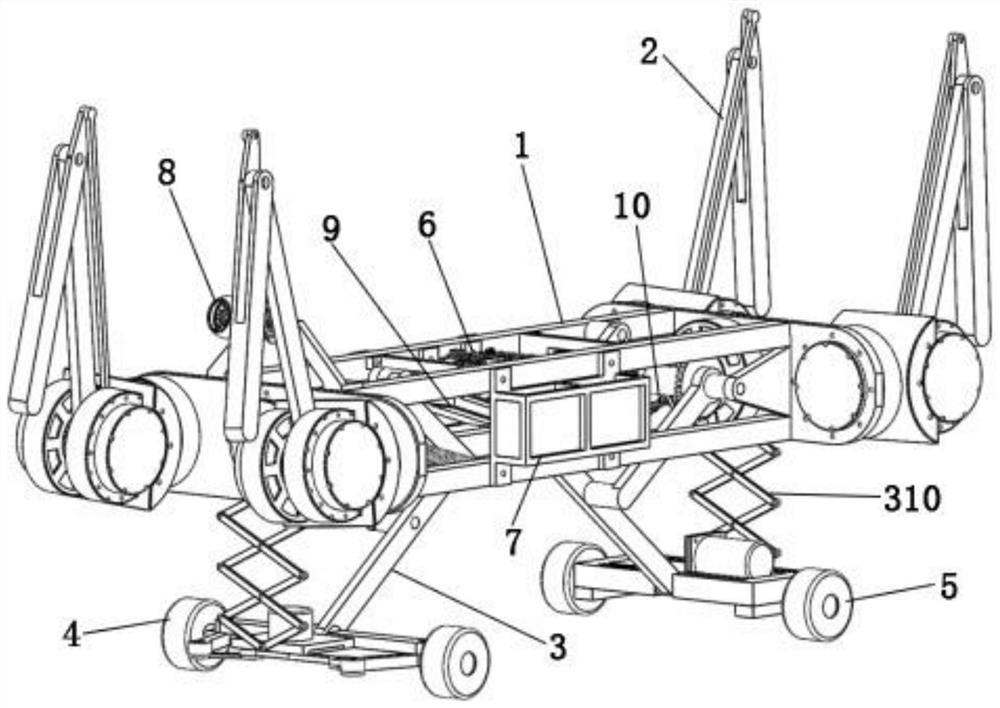
[0033] Such as Figures 1 to 12 Multi-modal motion wheel Discrete quadruped robot leg, includes a body 1, leg 2, wheel lifting mechanism 3, a front wheel module 4, the rear module 5, control system 6, 7 of the battery energy storage module, the visual sensor 8 , an electromagnetic suction means 9 and the spring energy storage means 10;
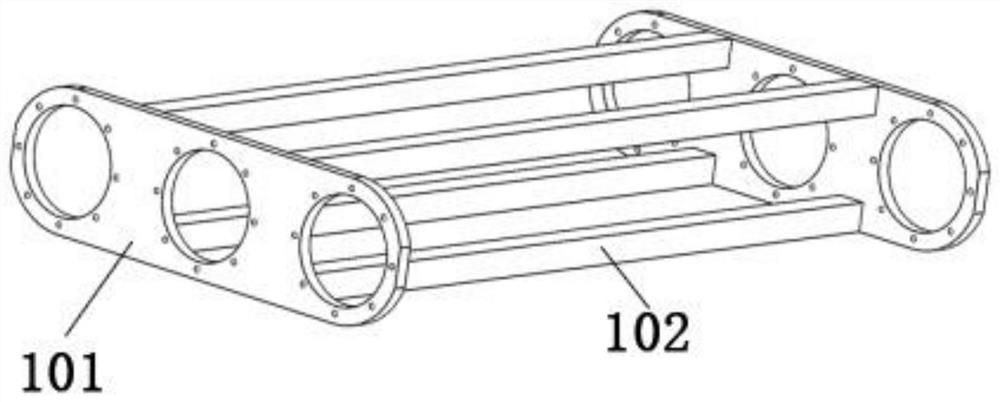
[0034] The body 1 includes a frame 101, the frame 101 has two, between the two frames 101 connecting shaft 102 provided with a plurality root, in order to achieve a connection between the two front frame 101;
[0035]There are four of the legs 2, which are located on both sides of the two frames 101, including the arcuate motor frame 201, a thigh lever 202, a calf rod 203, auxiliary rotation long rod 204, auxiliary rotation short The rod 205, the No. 1 drive motor 206, the second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com