Mobile robot path planning method based on improved butterfly optimization algorithm
A mobile robot and optimization algorithm technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve problems affecting the optimization efficiency, robot false death, unfavorable mobile robot walking, etc., to improve the global search capacity, quality improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
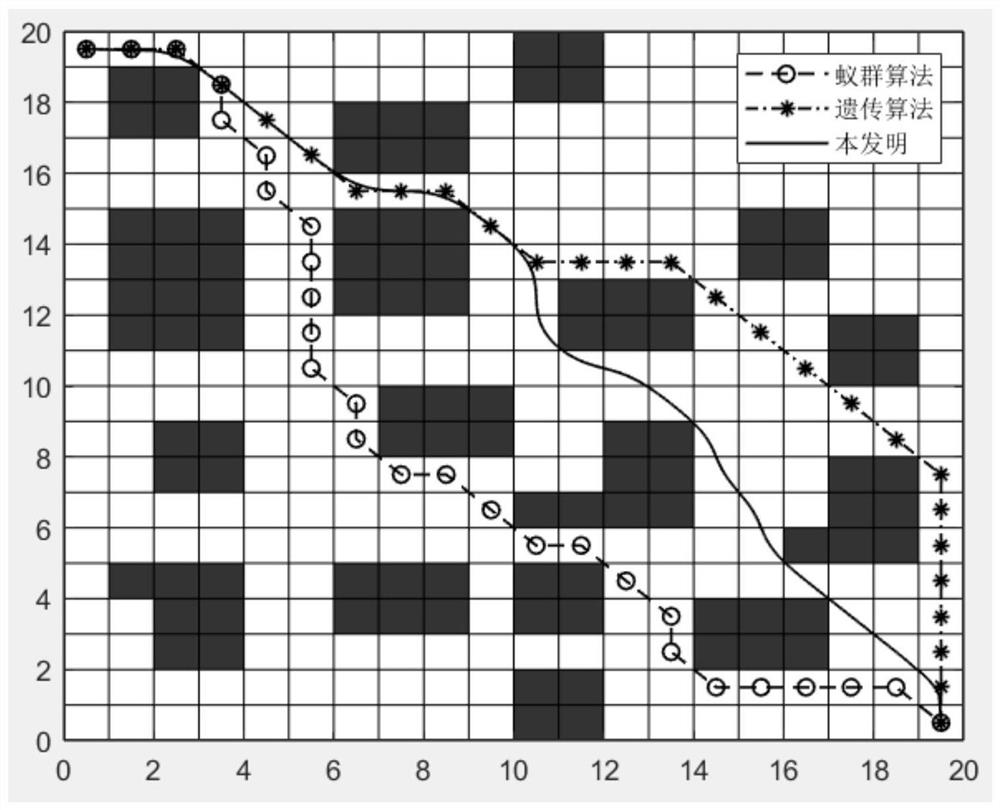
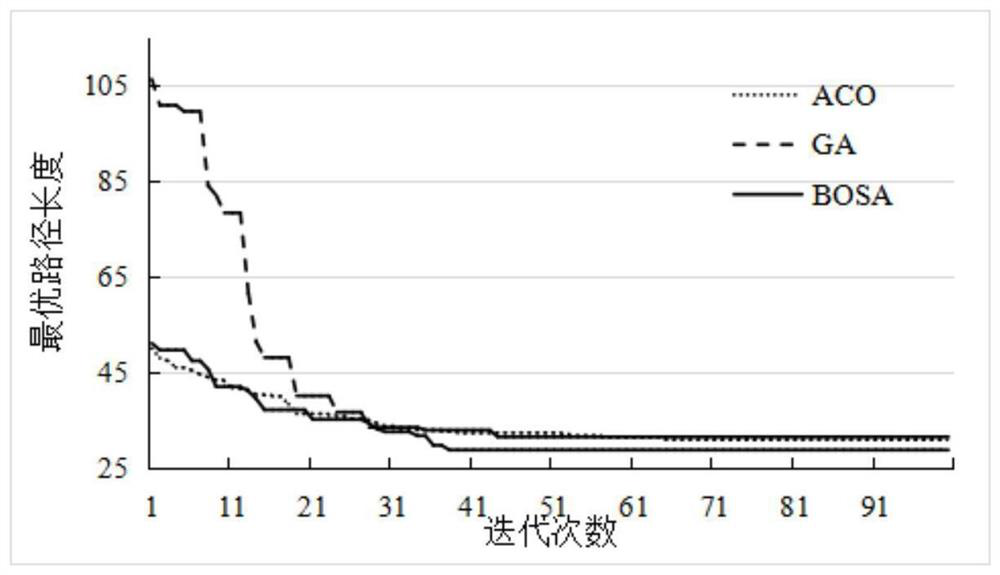
[0062] In order to verify the effectiveness and feasibility of the present invention, a grid working environment of 20 × 20 is established using the grid method, and the path searched by the improved butterfly optimization algorithm of the present invention and the ant colony algorithm and the genetic algorithm are respectively simulated under the same conditions experiment, the results of which are figure 2 and image 3 shown.
[0063] Through the comparison and analysis of simulation experiments, it can be seen that the present invention can effectively solve the path planning problem of mobile robots, and compared with the paths generated by ant colony algorithm and genetic algorithm, the present invention has faster path optimization speed, better stability, The efficiency is higher, and the quality of the obtained solution is better. It is an effective and feasible path planning algorithm.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com