Robot motion control method and device, electronic equipment and medium
A technology of robot motion and control method, which is applied in the fields of electronic equipment and media, devices, and robot motion control methods. It can solve problems such as trajectory accuracy decline, mechanical vibration, and robot response lag, and achieve the effect of improving response speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
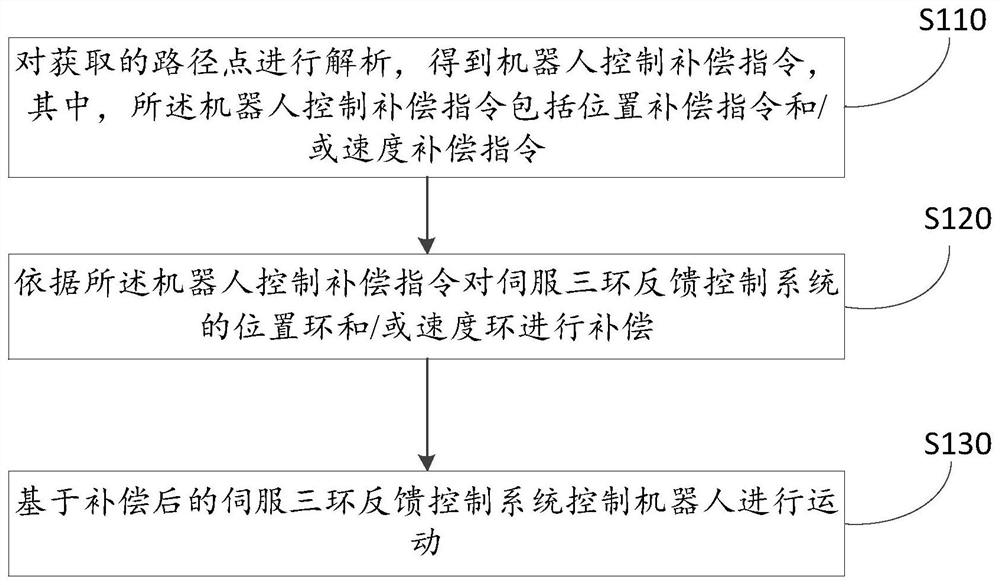
[0032] figure 1 It is a flow chart of a robot motion control method provided in Embodiment 1 of the present invention. This method is applicable to control industrial robots moving according to a predetermined trajectory. This method can be executed by a robot motion control device, which can be controlled by software and / or Or hardware implementation, and can be integrated in electronic equipment. Such as figure 1 As shown, the robot motion control method in this embodiment includes the following steps:
[0033] S110. Analyzing the acquired waypoints to obtain robot control compensation instructions, wherein the robot control compensation instructions include position compensation instructions and / or speed compensation instructions.
[0034] At present, in the field of industrial robot motion control, the commonly used servo three-loop feedback control strategy is to use the error value to control the motion of the robot through the feedback strategy. Although this control ...
Embodiment 2
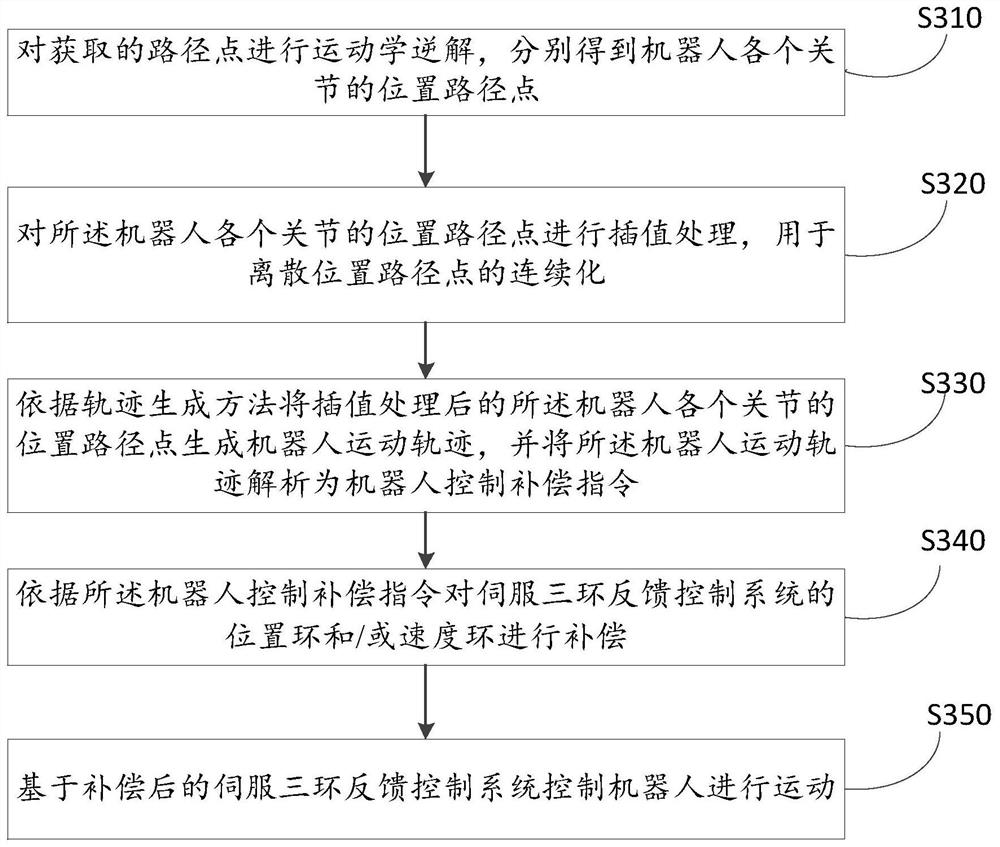
[0042] image 3It is a flow chart of another robot motion control method provided in Embodiment 2 of the present application. The embodiments of the present invention further optimize the foregoing embodiments on the basis of the foregoing embodiments, and the embodiments of the present invention may be combined with various optional solutions in the foregoing one or more embodiments. Such as image 3 As shown, the robot motion control method provided in the embodiment of the present invention may include the following steps:
[0043] S310. Carry out kinematic inverse solution to the obtained path points, and respectively obtain the position path points of each joint of the robot
[0044] Among them, kinematics inverse solution refers to the process of solving the motion parameters of each joint of the robot according to the given position and attitude of the end effector of the robot relative to the reference coordinate system that meets the work requirements. The joint of...
Embodiment 3
[0070] Figure 5 It is a flow chart of another robot motion control method provided in Embodiment 3 of the present application. The embodiments of the present invention further optimize the foregoing embodiments on the basis of the foregoing embodiments, and the embodiments of the present invention may be combined with various optional solutions in the foregoing one or more embodiments. Such as Figure 5 As shown, the robot motion control method provided in the embodiment of the present invention may include the following steps:
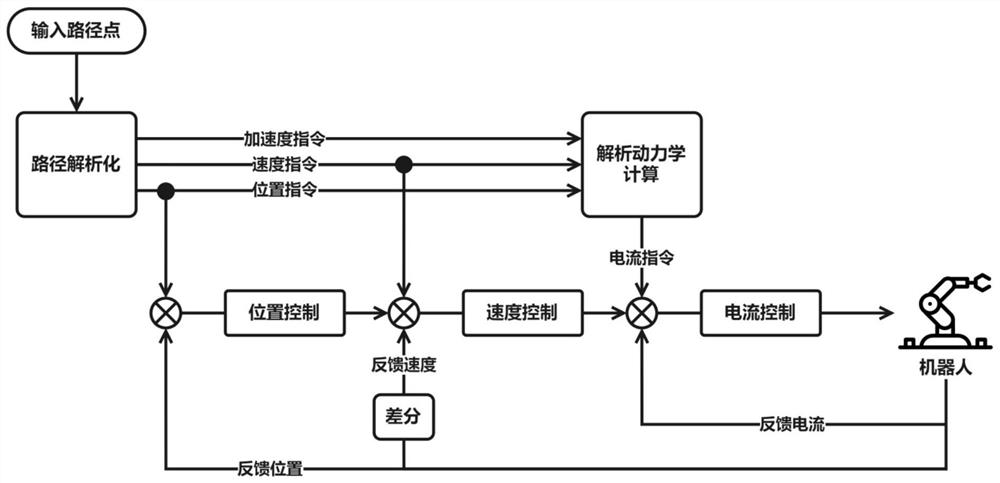
[0071] S510. Analyze the obtained path points to obtain robot control compensation instructions, where the robot control compensation instructions include position compensation instructions, speed compensation instructions, and acceleration compensation instructions.
[0072] Among them, such as figure 2 As shown, when analyzing the obtained waypoints, an acceleration compensation command can also be obtained.
[0073] In an optional solution of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com