


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A variable caliber magnetically controlled inner helical vascular robot
A robot and internal spiral technology, applied in the field of vascular robots, can solve the problems of unstable movement process, slow progress of micro-robots, insufficient power, etc., and achieve the effects of improving flexibility, increasing pressure difference, and increasing movement speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
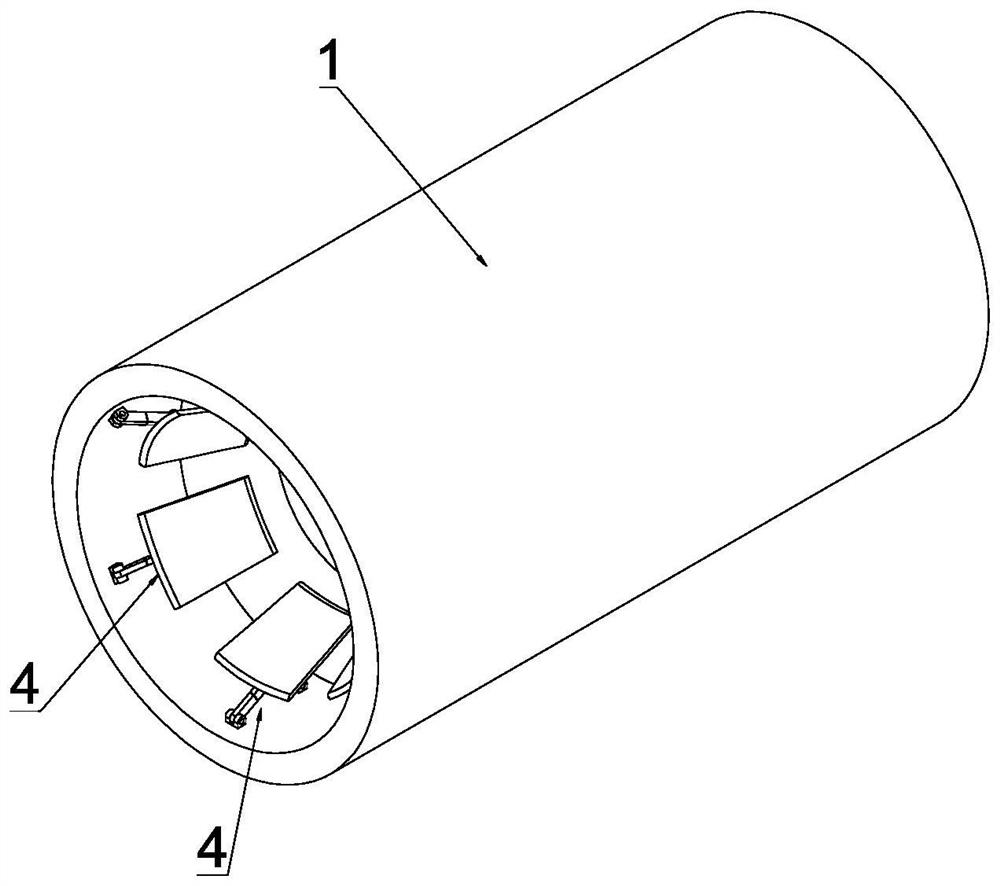
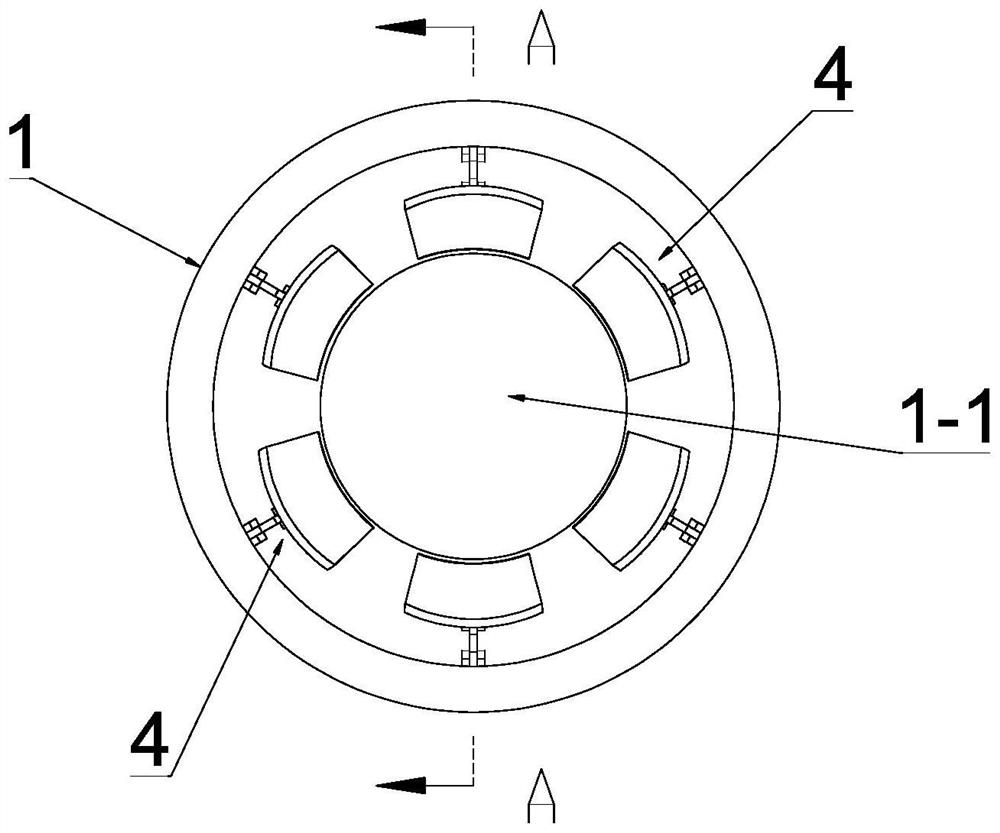
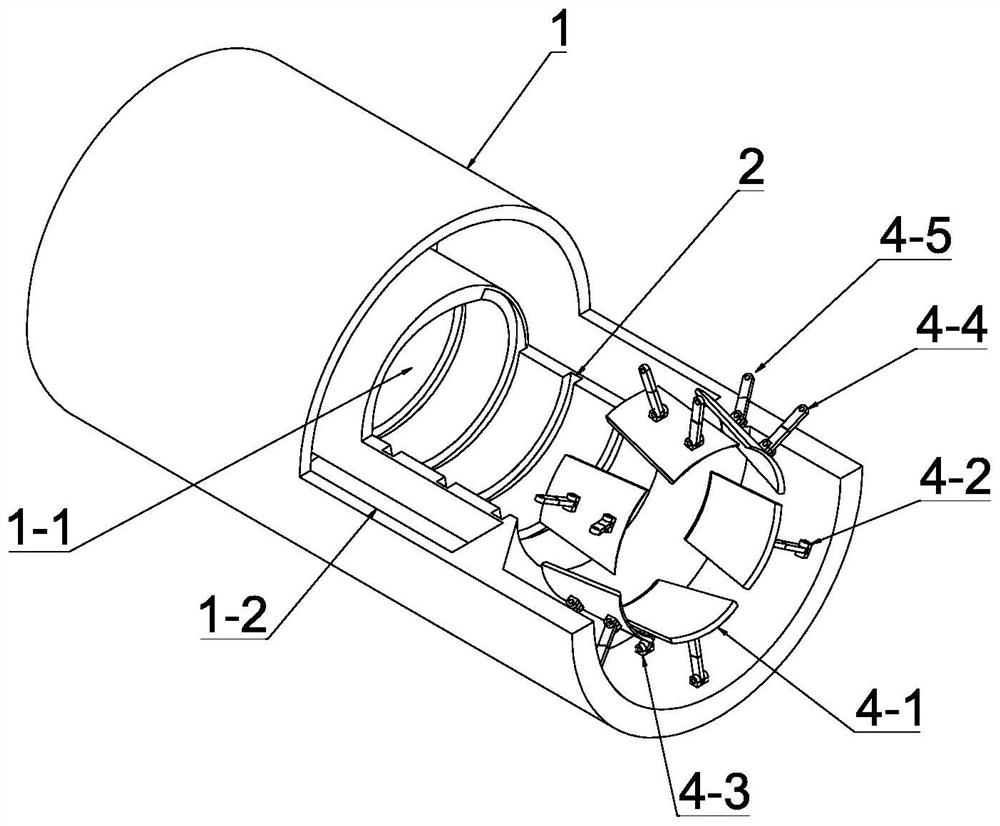
[0036] see Figure 1-Figure 5 , this embodiment discloses a magnetically controlled inner helical vascular robot with variable caliber, including a robot main body 1, a permanent magnet (not shown in the figure), a magnetic field generating device (not shown in the figure) and an execution device (not shown in the figure). shown), the robot main body 1 is a tubular body, and the robot main body 1 has a hollow cavity 1-1 passing through the robot main body 1 and an annular inner cavity 1 coaxially arranged with the hollow cavity 1-1 -2. Both the permanent magnet and the actuator are installed in the annular inner cavity 1-2. The hollow cavity 1-1 includes a drive cavity 1-11 in the middle and a drive cavity 1-11. The installation cavities 1-12 at the front and rear ends, the inner wall of the drive cavity 1-11 is provided with a spiral groove 2, wherein, each of the installation cavities 1-12 is fixed with an elastic ring belt-shaped film 3, the The elastic ring-shaped film 3 ...
Embodiment 2
[0059] see Figure 6-Figure 7 , the other specific structures in this embodiment are the same as in Embodiment 1, the difference is that the movable connection structure includes a hinge seat 4-6 arranged on the inner wall of the installation cavity 1-12, and the adjustment blade 4-1 is One end close to the end of the hollow cavity 1-1 is hinged on the hinge seat 4-6, and the material of the regulating blade 4-1 is magnetic material. With the above-mentioned structure, the axial magnetic field generates a magnetic moment on the adjusting blade 4-1, and under the joint action of the blood impact and the magnetic moment, the adjusting blade 4-1 is made to swing, and the elastic ring belt-shaped film 3 is continuously squeezed during the swinging process, so that The caliber of the elastic ring belt-shaped film 3 changes, thereby controlling the size of the openings at both ends of the robot main body 1 .
[0060] see Figure 6-Figure 7 , one end of the regulating vane 4-1 hing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com