


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Follow-up remote control console and remote control method thereof
A console and follow-up technology, applied in the direction of program control, computer control, general control system, etc., can solve the problems of low control efficiency and poor control flexibility, achieve the effect of extending the range of capabilities and improving the effect of on-the-spot immersion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
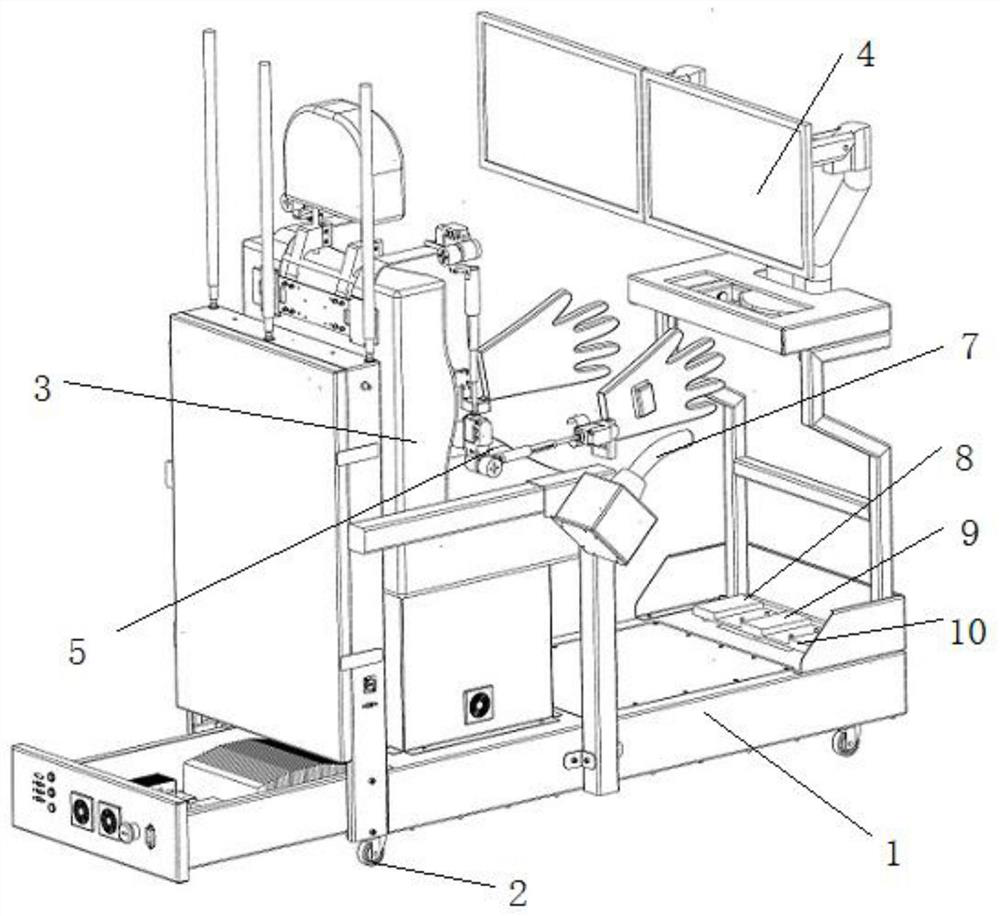
[0040] A specific embodiment of the present invention provides a follow-up remote control console, such as figure 1 , figure 2 As shown, the console 1 is integrated with a wearable full-joint follow-up remote control device (referred to as follow-up remote control device 5), a seat 3, an image display device, two-way audio interaction, a joystick, a foot switch, an industrial keyboard, a communication Receiver and antenna.
[0041] Among them, the communication receiving equipment and antenna are used to obtain the surrounding environment information of the robot, and display it through the image display device, so that the operator at the control end can understand the on-site information.
[0042] The seat 3 is installed directly above the console 1, and is used for the operator to ride while wearing the follow-up remote operation device 5 for remote operation of the robot.
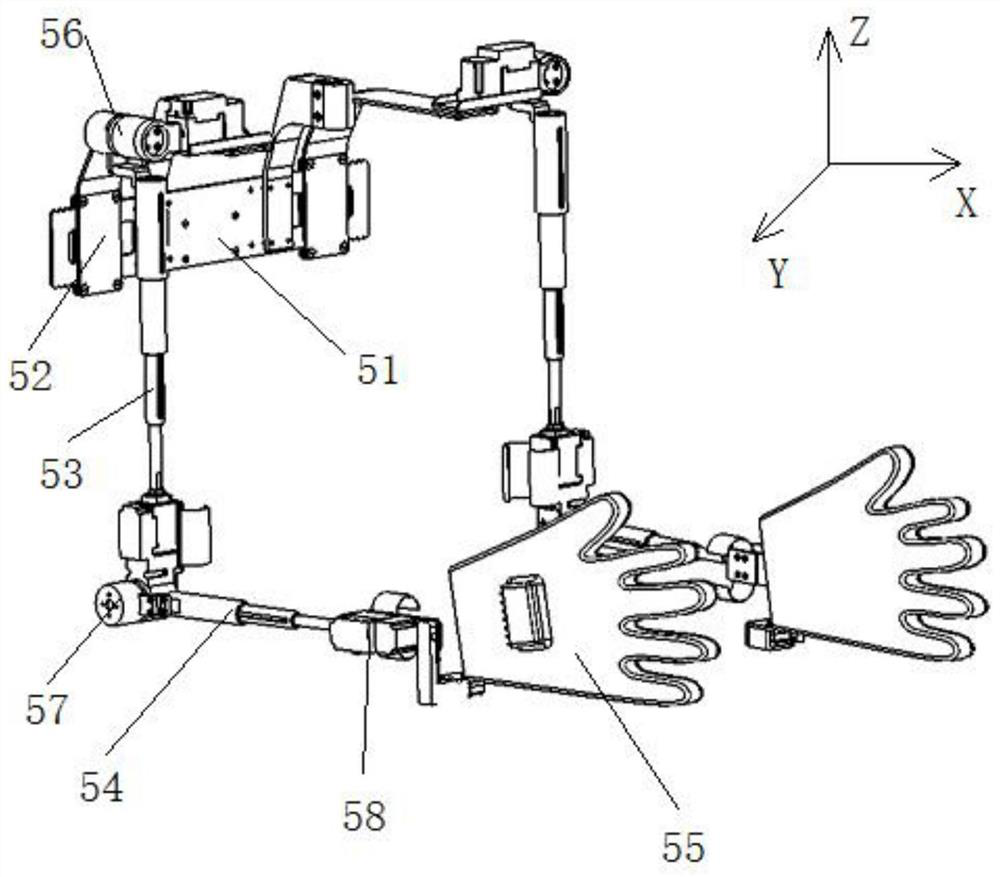
[0043] The wearable full-joint follow-up remote control operation device is installed above the s...
Embodiment 2
[0106] This embodiment provides a remote control method for a follow-up remote control console. Using the follow-up remote control console in Embodiment 1, it can collect human body motion information and control the robot to perform the same action as the human body in a synchronous manner, specifically including the following step:
[0107] Step 1: Start the console 1 and execute the robot; check whether the system is normal;
[0108] The job site information collected by the robot end is transmitted to the console 1 through a wireless signal, specifically, it is received through the antenna of the communication receiving device, and further, the site information is displayed through an image display device (display screen 4 or VR glasses);
[0109] Step 2: Wear the follow-up remote control device 5, start the first switch 8, and perform attitude acquisition; during the attitude acquisition process, both the operator and the execution robot maintain a "zero attitude", such a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com