Multi-terminal interaction method, device and system
An interactive method and a multi-terminal technology, applied in the field of robotics, can solve the problems of fixed multi-terminal data transmission paths and difficulties in cooperative scheduling, and achieve the effects of convenient collaborative scheduling, flexible data transmission and interaction, and efficient data transmission methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
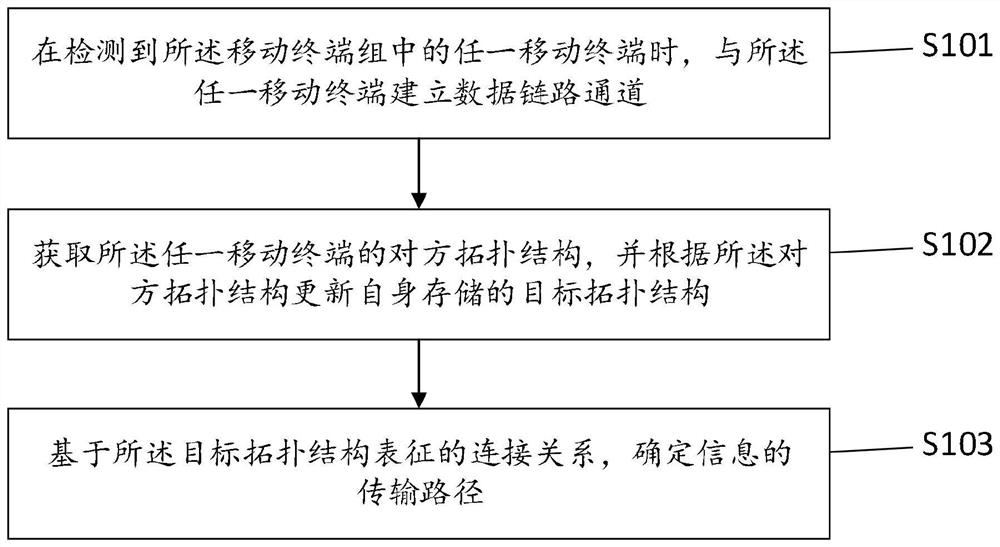
[0053] In this embodiment, a multi-terminal interaction method is provided, such as figure 1 As shown, the method is applied to the target mobile terminal in the mobile terminal group, and the method includes:
[0054] Step S101, when any mobile terminal in the mobile terminal group is detected, establish a data link channel with the any mobile terminal;
[0055] Step S102, obtaining the topological structure of the other party of any mobile terminal, and updating the target topological structure stored by itself according to the topological structure of the other party;
[0056] Step S103, based on the connection relationship represented by the target topology, determine the transmission path of the information.
[0057] In the embodiment of the present application, the mobile terminal may be a robot, a mobile phone, a tablet or a computer, which is not limited here and will not be cited one by one.
[0058] Preferably, the mobile terminal is a robot. At present, it is diffic...
Embodiment 2
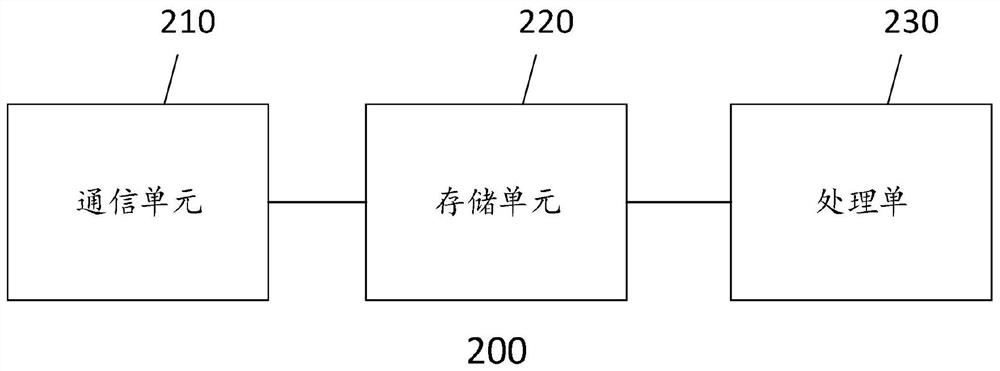
[0080] Based on the same inventive idea, such as figure 2 As shown, this embodiment provides a mobile terminal device 200, including:
[0081] A communication unit 210, configured to establish a data link channel with any mobile terminal when any mobile terminal in the mobile terminal group is detected;
[0082] The storage unit 220 is configured to obtain the topological structure of the counterpart of any mobile terminal, and update the target topology stored by itself according to the topological structure of the counterpart;
[0083] The processing unit 230 is configured to determine a transmission path of information based on the connection relationship represented by the target topology.
[0084] Since the mobile terminal device introduced in this embodiment is a device used to implement the multi-terminal interaction method in the embodiment of the present invention, based on the multi-terminal interaction method introduced in the embodiment of the present invention, ...
Embodiment 3
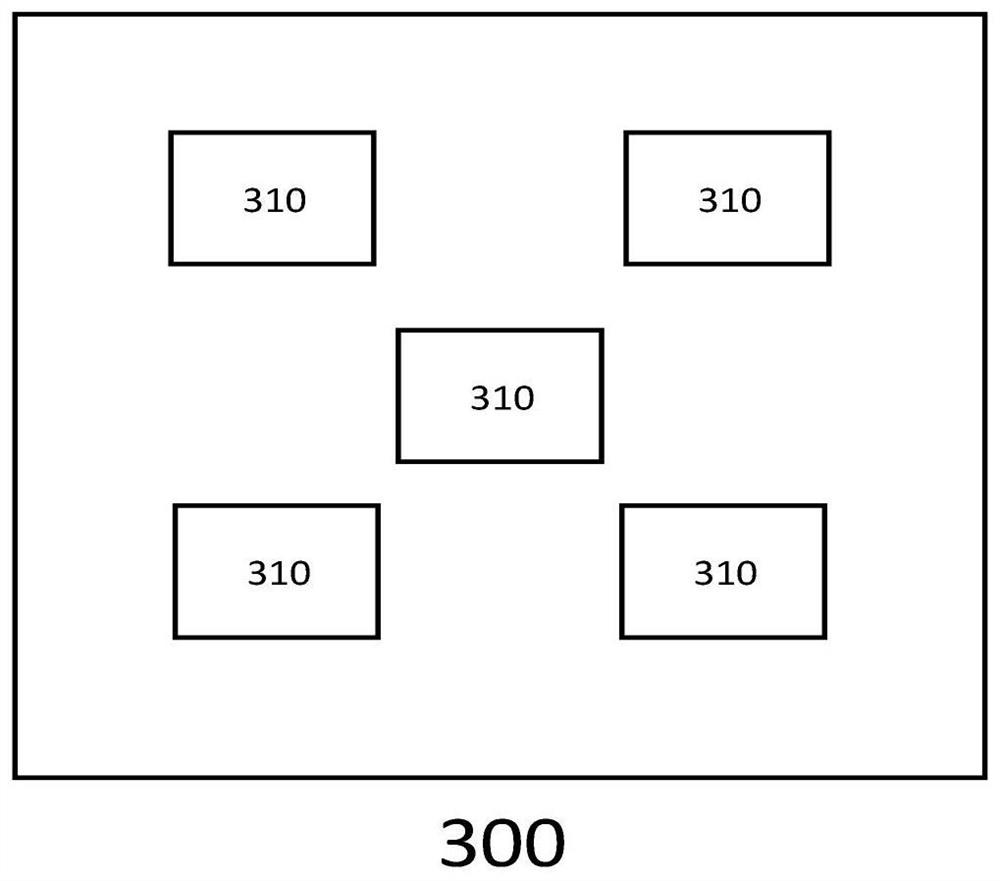
[0086] Based on the same inventive idea, such as image 3 As shown, this embodiment provides a mobile terminal system 300, including:
[0087] a plurality of mobile terminals 310;
[0088] The mobile terminal includes: a communication unit, a storage unit, and a processing unit;
[0089] Wherein, the communication unit is used to establish a data link channel with any mobile terminal when any mobile terminal in the mobile terminal group is detected; the storage unit is used to obtain the counterparty of any mobile terminal topology, and update the target topology stored by itself according to the topology of the other party; the processing unit is configured to determine the transmission path of information based on the connection relationship represented by the target topology.
[0090] Optionally, the communication unit is a Wi-Fi device, so as to realize an ad hoc network drive and an extensible information exchange protocol.
[0091] The above-mentioned technical soluti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com