Multi-UAV cooperative search path planning method in key target sealing and control
A technology of searching paths and multi-UAVs, which is applied in the field of UAVs to achieve the effect of improving feasibility and ensuring diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
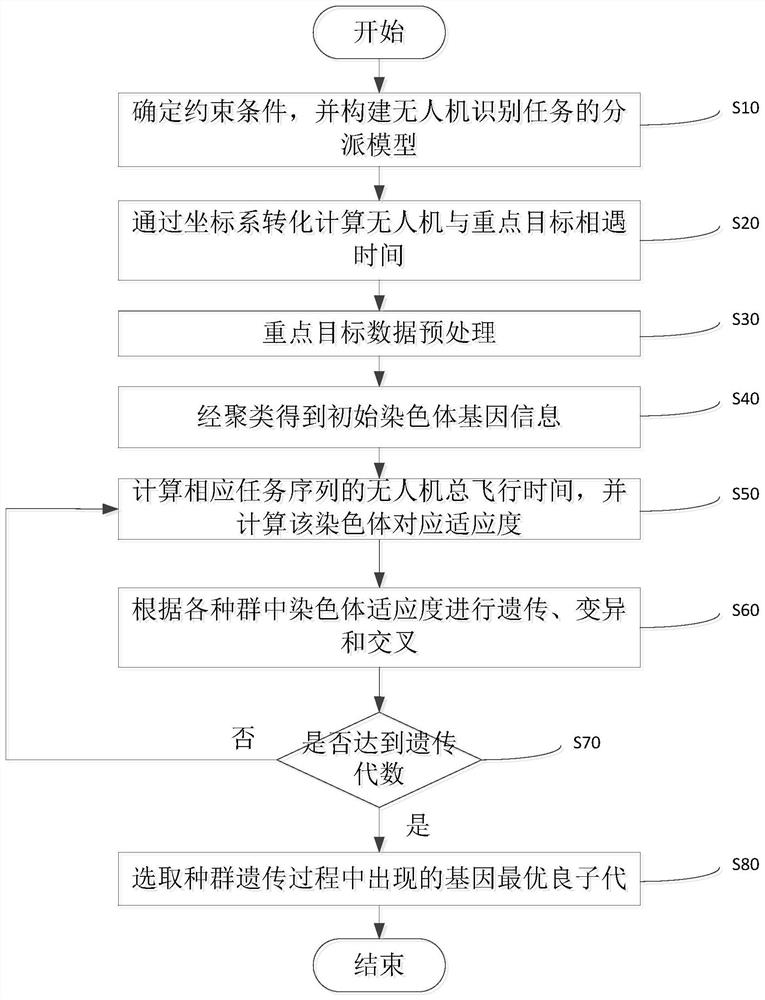
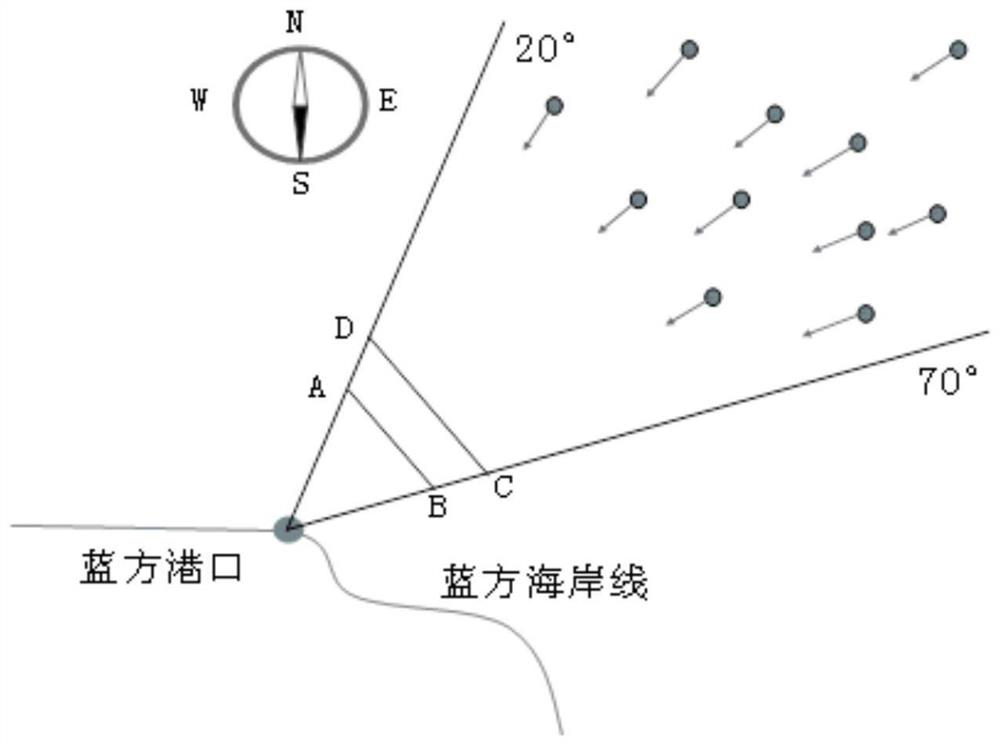
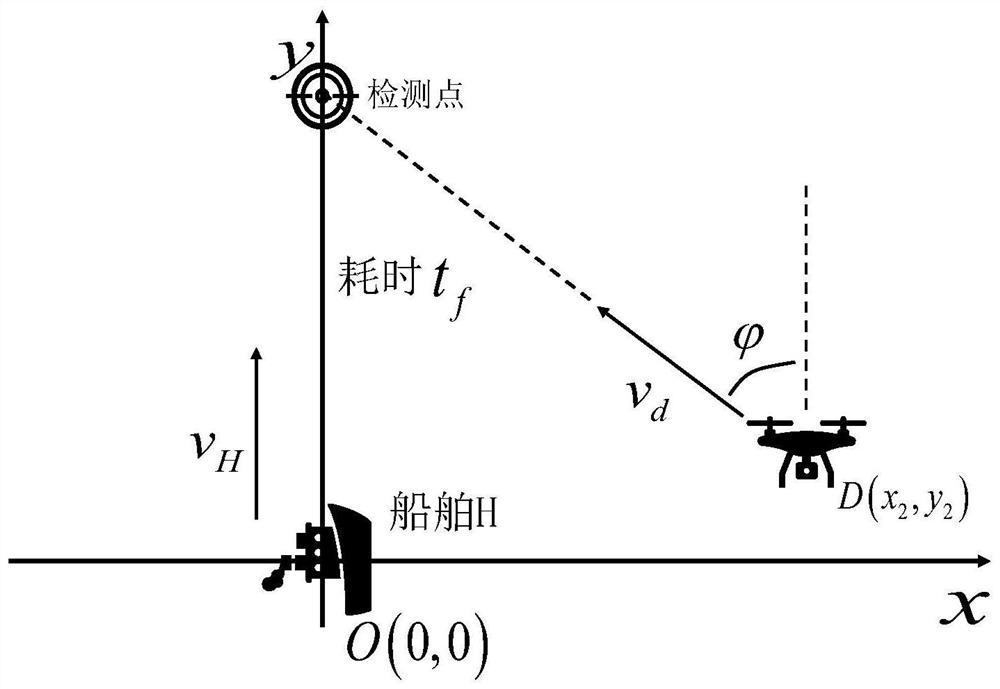
[0086] This embodiment takes the search of merchant ships by UAVs in port sealing and control tasks as an example to illustrate the multi-UAV collaborative search path planning method for key target sealing and control disclosed by the present invention, but the present invention can also be applied to other key target sealing In control tasks, such as in the sealing and control of key buildings, the recognition and search of passing vehicles by drones, etc., the present invention does not limit this. The present invention uses unmanned aerial vehicles as the intercepting force, but the present invention can also use other intercepting forces such as airplanes, missiles, etc. for key target sealing and control tasks, and the present invention is not limited to this. In the port sealing task, this embodiment makes the following assumptions:
[0087] 1) Assume that all the merchant ships sailing to the port point to the center of the circle, the merchant ships move forward at a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com