Improved layered AUV collaborative navigation and positioning method for different-time sequential measurement
A technology of collaborative navigation and positioning methods, applied in navigation computing tools and other directions, can solve problems such as clock asynchrony, achieve the effect of improving robustness, and realizing interaction and integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
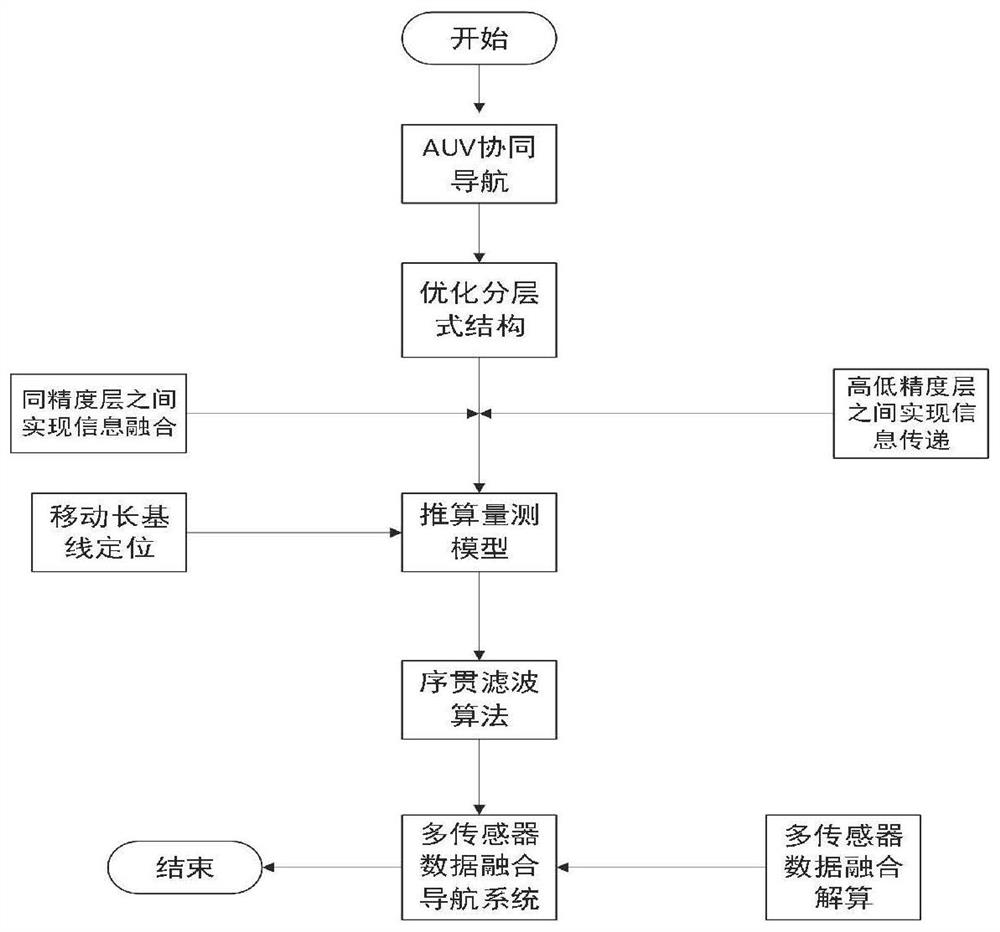
[0055] Such as figure 1 As shown, the improved layered AUV cooperative navigation and positioning method of different time sequential measurement of the present invention includes the following steps:
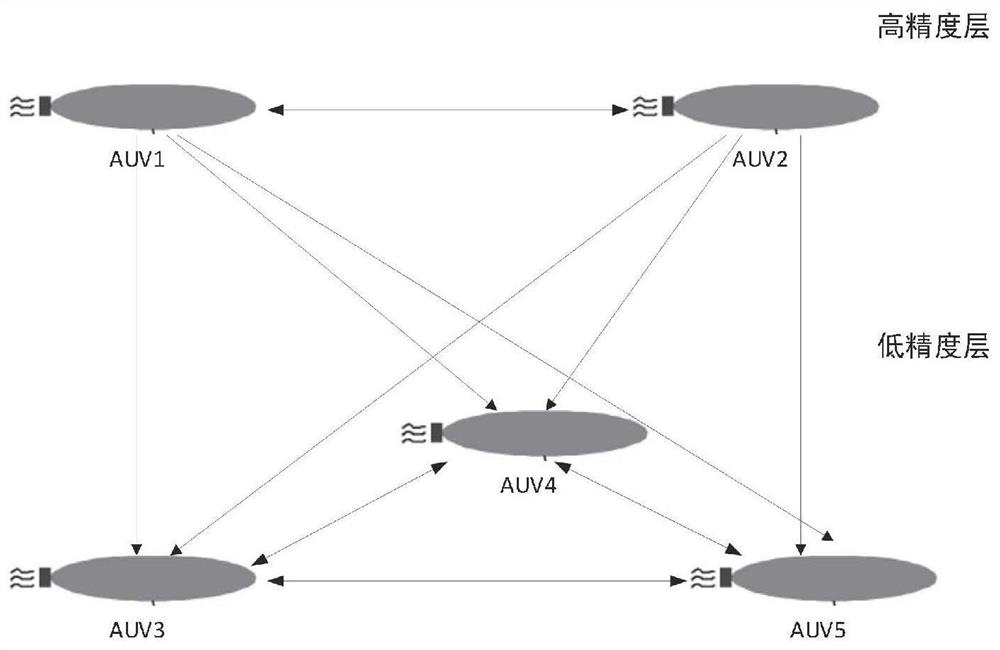
[0056] (1) A layered cooperative navigation formation structure is proposed to carry out AUV cooperative navigation and provide a computing platform for the heterochronous sequential filtering method; in the navigation process, by optimizing the structure of the hierarchical cooperative navigation formation, the formation of the cooperative navigation formation optimized, such as figure 2 shown;
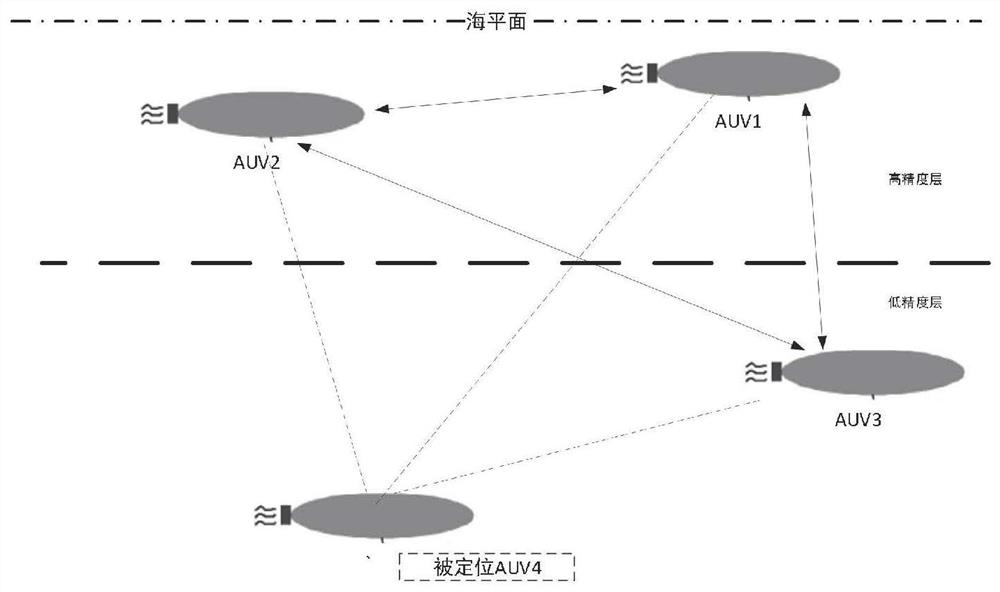
[0057] (2) The original Long Baseline (LBL) method is improved by the Moving Long Baseline (LBL) method, and the dead reckoning is performed by the Moving Long Baseline method, and the measurement model of the positioned AUV is calculated ;
[0058] (3) Using the different time sequential measurement method to solve the positioning error problem caused by the delay of the underwat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com