Flexible arm device and control method thereof
A flexible body and controller technology, applied in the field of robotic arms, can solve the problems of poor affinity and safety, high cost, complicated control, etc., and achieve good affinity and safety, convenient angle and force, and precise control effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
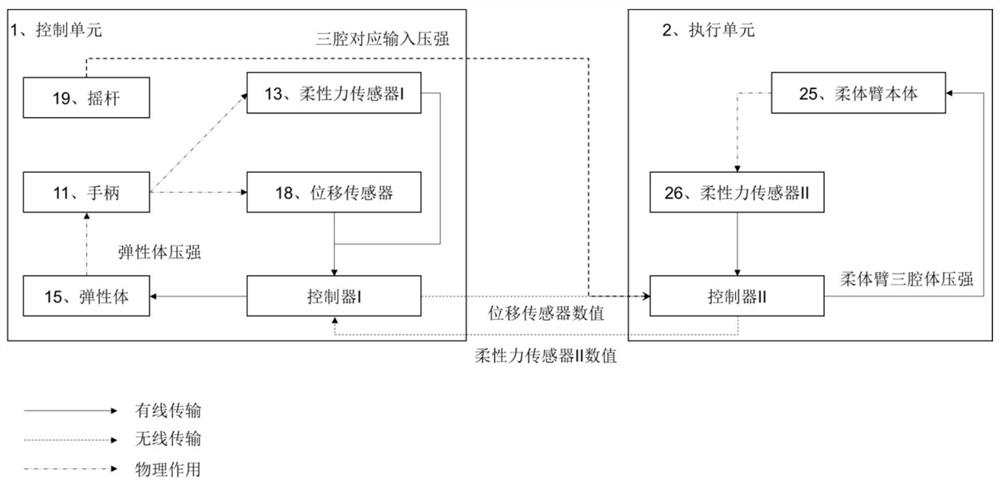
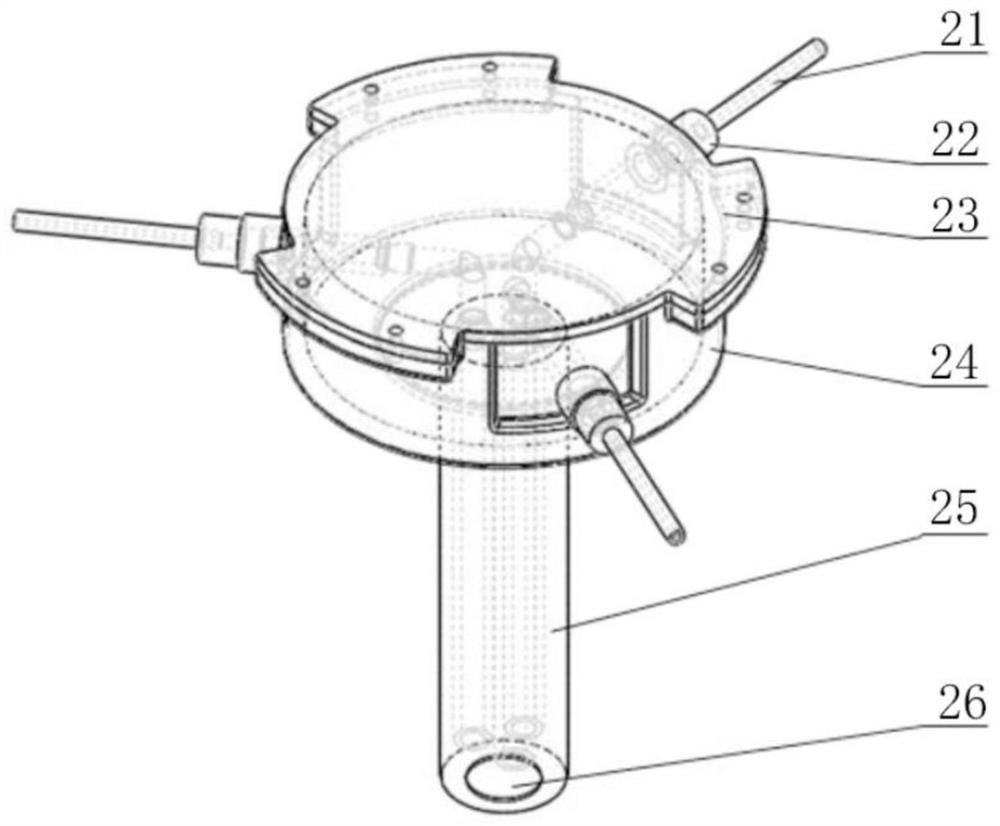
[0042] refer to Figure 1 to Figure 3As shown, a flexible arm device is improved in that it includes a control unit 1 and an execution unit 2 connected to the control unit 1 through a communication module; The flexible body arm body 25 on one side of 24, the top cover 23 that is arranged on the other side of the fixed seat 24, at least three trachea connectors II22 are arranged on the side elevation of the fixed seat 24, and the trachea connector II22 is located on the fixed seat 24. The end outside the seat 24 is connected to the proportional valve II, and the proportional valve II is connected to the air pump II; the inside of the flexible arm body 25 is provided with air flow passages corresponding to the number of the air pipe joint II22, and the air pipe joint II22 The end located in the fixed seat 24 is connected to the airflow passage, and the lower end of the airflow passage is closed and does not exceed the lower end surface of the flexible arm body 25; the control un...
Embodiment 2
[0051] On the basis of Embodiment 1, the execution unit 2 further includes a flexible force sensor II26, the flexible force sensor II26 is located on the lower end surface of the flexible arm body 25, and the flexible force sensor II26 is connected with the controller II connect.
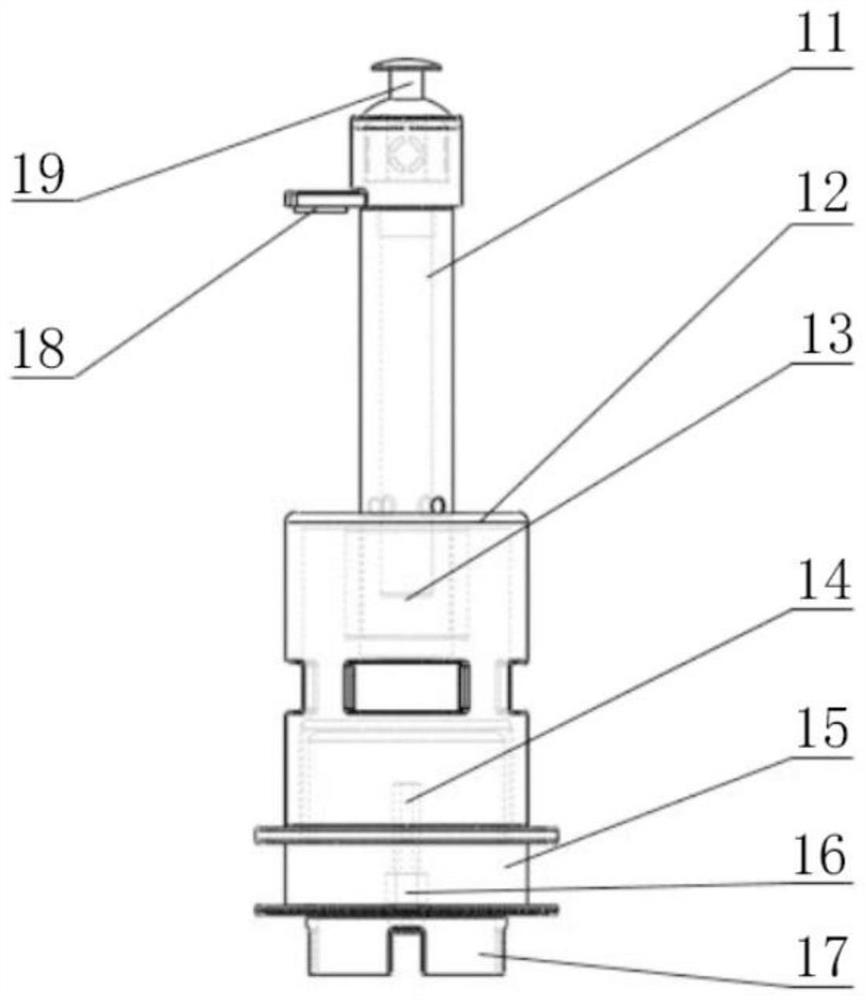
[0052] Further, the control unit 1 further includes a casing 12 and an elastic body 15 , the elastic body 15 is located inside the casing 12 , and the upper end of the elastic body 15 abuts against the lower end of the handle 11 .
[0053] In this embodiment, the arrangement of the elastic body 15 is used to simulate the reaction force received by the end of the flexible arm body 25 in the execution unit 2. When the flexible arm body 25 is in contact with the outside world, the value of the flexible force sensor II26 changes. The parameters of the flexible force sensor II26 are transmitted to the controller II, and the controller II transmits the parameters to the controller I through the communicat...
Embodiment 3
[0055] On the basis of Embodiments 1 and 2, the control unit 1 further includes a flexible force sensor I13, the flexible force sensor I13 is located between the contact surface of the handle 11 and the elastic body 15, the flexible force sensor I13 is connected with the controller 1.
[0056] Further, the control unit 1 also includes a base 17, on which a trachea joint I16 is arranged, the upper end of the trachea joint I16 is connected with a trachea I14, and the upper end of the trachea I14 extends into the elastic body 15.
[0057] Further, the lower end of the air pipe joint I16 is connected to a proportional valve I, the proportional valve I is connected to the air pump I, and the proportional valve I is connected to the controller I.
[0058] When the handle 11 is in contact with the elastic body 15, the value of the flexible force sensor I13 is sent to the controller I, and the controller I compares the value of the flexible force sensor II26 with the value of the flex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com