Moving target positioning method under clock skew and clock drift conditions
A clock drift and clock deviation technology, applied in the field of target positioning, can solve the problems of not considering clock synchronization, not considering clock synchronization, etc., and achieve the effect of overcoming low positioning accuracy and low computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
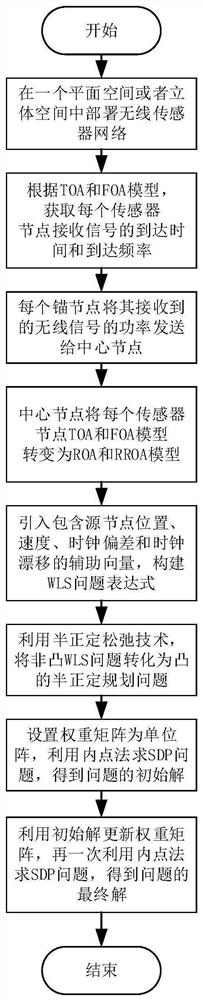
[0033] The present invention proposes a moving target positioning method under the condition of clock deviation and clock drift, and its overall realization block diagram is as follows figure 1 As shown, it includes the following steps:
[0034] Step 1: Deploy a wireless sensor network in a planar space or a three-dimensional space. In the wireless sensor network, there is one source node for transmitting wireless signals with unknown position and speed, and N source nodes for receiving wireless signals with known positions and speeds. The sensor node of the signal, a central node for estimating the position and velocity of the source node and the clock bias and clock drift between the source node and the sensor node, and the position of the source node is recorded as x o , denote the velocity of the source node as v o , record the positions...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com